드론의 비행 원리
드론의 비행 원리를 이해하기 이전에, 먼저 헬리콥터의 비행원리를 알아보는 것이 좋습니다.
헬리콥터의 비행 원리
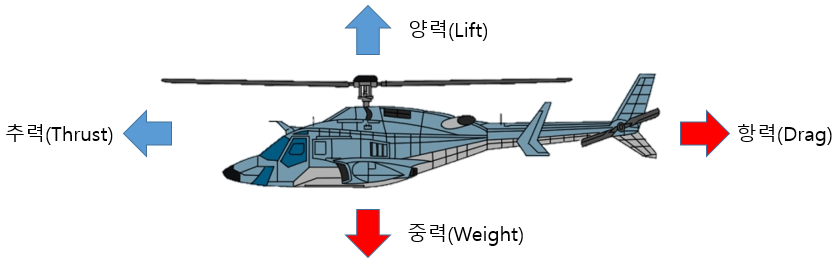
헬리콥터의 비행과 관련된 4가지 힘은 그림과 같습니다.
- 양력: 로터의 회전에 의해 발생하는 힘으로, 이를 조절하여 상승, 하강, 호버링을 할 수 있습니다.
- 추력: 로터 회전면의 기울기를 조절하여 전진하려는 힘인 추력을 발생시키고, 이를 조절하여 가속 또는 감속을 조절합니다.
- 항력
- 중력
헬리콥터의 토크와 반토크
헬리콥터 블레이드의 회전
반시계 방향으로 회전하는 블레이드가 있다고 가정합니다. 이 블레이드가 빠른 속도로 회전하면 양력이 발생하여 상승하게 됩니다.
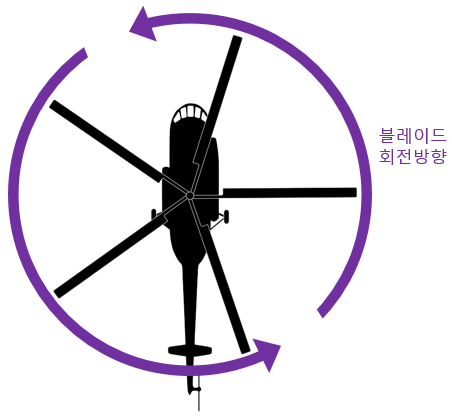
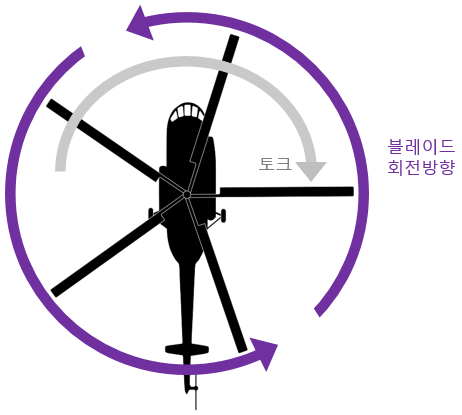
헬리콥터의 토크
그런데 블레이드 회전에 의해 생기는 토크(회전체에 매달려 있는 물체가 회전체의 반대방향으로 회전하려는 힘)도 함께 발생하죠. 즉, 블레이드가 (반시계방향으로) 빠른속도로 회전하면 양력이 발생하여 상승하게 되는데요. 이때 발생하는 토크(회전체에 매달려 있는 물체가 회전체의 반대방향으로 회전하려는 힘)로 인해 (양력에 의해 상승함과 동시에) 동체는 시계방향으로 회전하며 빙글빙글 돌게 됩니다.
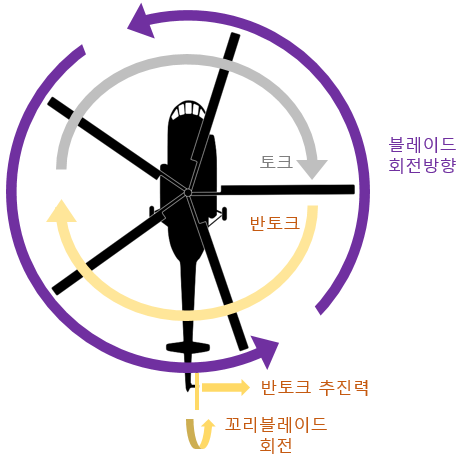
토크에 대한 반토크
그러므로 동체가 회전하지 않도록 토크를 상쇄할 수 있는 반토크(anti-torque)를 만들어 주어야 합니다. 이를 위해 일반적으로 꼬리쪽에 작은 블레이드를 추가합니다. 꼬리블레이드가 회전하면 반토크를 만들 추진력이 생기고 이 힘으로 반토크를 만들어 낼 수 있습니다. 이렇게 되면 동체가 회전하지 않고 안정적으로 상승이 가능해지게 되는 것입니다.
모든 헬리콥터는 토크와 반토크를 조절하여 동체가 회전하지 않고 안정적으로 운용될 수 있도록 하는 것이 가장 중요합니다.
동축반전식 헬기
반토크를 만들어내는 또 다른 방식은 동축반전식 헬기입니다. 두 개의 블레이드를 위아래로 배치하고 서로 반대방향으로 회전시켜 양력을 얻음과 동시에 서로간의 토크를 상쇄하는 방식입니다.

텐덤날개회전식 헬기
대형 헬리콥터에서는 동체 앞뒤로 2개의 로터로 회전방향을 반대로 하여 서로의 토크를 반토크로 이용하는 텐덤날개회전방식을 이용하기도 합니다.

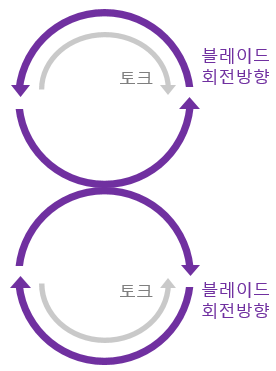
텐덤날개회전식 헬기의 원리
이것을 Top View로 나타내면 다음과 같습니다. 두개의 블레이드가 서로 반대방향으로 회전하면서 서로의 토크를 상쇄시켜주게 되는 것이죠.
드론
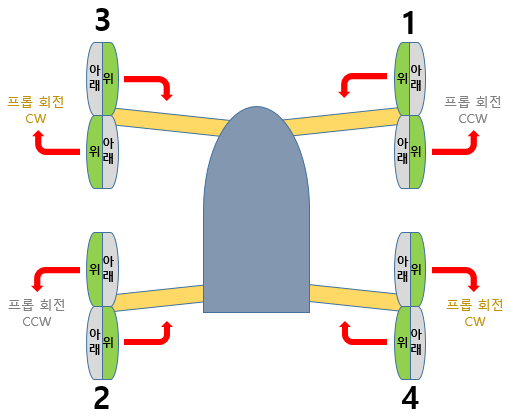
드론의 경우도 마찬가지 입니다. 쿼드콥터 드론은 4개의 프롭를 사용하여 토크-반토크의 균형이 이루어집니다. 이 상태에서 프롭의 회전속도를 빠르게 증가시키면 양력이 발생하여 수직 상승이 이뤄지고 회전속도를 느리게 하면 양력과 중력이 균형을 이루는 호버링 상태를 만들 수 있습니다. 물론 회전속도를 보다 더 느리게 만들면 양력보다 중력이 커지게 되어 수직 하강하게 됩니다.
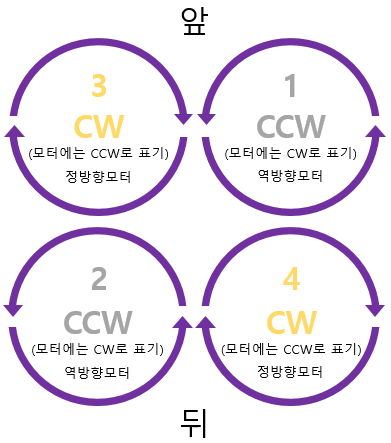
여기서 한가지 유의할 점은 프롭의 회전방향은 실제 모터의 SPEC에 표기된 회전방향과는 반대라는 것입니다. 즉, 위 그림에서 1,2번 프롭의 회전방향은 CCW이지만 실제로는 CW규격의 모터를 사용해야 합니다. 이것은 모터의 실제 회전방향과 모터에 끼워져있는 프롭의 회전방향을 외부에서 관측하는 방향이 서로 반대이기 때문입니다.
옛날에 사용한 단발프롭 비행기를 생각해보세요. 비행기 조종사가 조종석에 앉아 앞쪽의 프롭을 바라볼 때 관측되는 프롭의 회전방향이 실제 모터의 SPEC상 회전방향이며, 이 방향이 CCW라고 가정합니다. 이 상황을 프롭을 비행기에 끼우는 정비사가 (조종석을 마주보며 정면에서) 관측해보면 프롭 회전방향이 CW가 되겠지요. 조종사는 프롭이 CCW로 돈다고 이야기하고(실제 모터의 SPEC상 회전 방향), 프롭을 끼운 사람은 CW로 돌아가는 상태로 보고있으니 같은 상황을 서로 반대가 되는 것입니다.
또 다른 이유는 모터를 판매할 때에는 모터캡(프롭너트)이 나사산을 따라 조여지는 방향으로 표기하기 때문입니다. 그러므로 1,2번 모터에 모터캡(프롭너트)을 돌려 끼울때에는 CW방향으로 돌려서 끼워야 하고, 3,4번 모터에 돌려 끼울때에는 CCW방향으로 돌려서 끼워야 합니다. 1,2번 모터가 실제로 CCW방향으로 회전하고, 프롭 나사산은 CW방향으로 돌려서 끼워지기 때문에, 프롭이 회전할 때 절대로 풀릴 위험이 없습니다. 만약 두 방향이 똑같다면 프롭이 고속으로 회전하면서 빠질 위험이 있으므로 주의해야 합니다. 만약 보유하고 있는 4개 모터의 나사산 방향이 모두 똑같다면 두 가지 방법으로 문제를 해결할 수 있습니다. 첫째, 나사산 방향이 반대인 프롭어댑터를 2개 구입하거나, 둘째, 나이록(niloc, nilon)너트 혹은 나이록후렌지 너트를 사용하여 조여주어야 합니다.
모터의 한글표기도 주의해야 하는데요. 예를 들어 1,2번 모터에 표기된 SPEC이 CW인데, 이 모터를 한글로 표기하거나 지칭할 때에는 SPEC에 표기된 방향이 아니라 (위에서 내려다 볼 때 보이는) 프롭의 회전방향에 맞춰 ‘역방향모터’라고 부릅니다. 마찬가지로 3,4번 모터를 ‘정방향모터’라고 합니다. 표기방법이 혼란스러운 면이 있다보니 역방향, 정방향을 반대로 표기하는 경우도 많아요. 그러므로 모터 구입시에는 모터에 표기된 SPEC을 보고 구입하는 것이 좋습니다.
이와 더불어 드론 조립 시에는 각 모터별로 어떤 모양의 프롭을 사용해야 하는지 유의해야 합니다. 프롭을 모터축에 꼽은 상태에서 프롭면을 보면 프롭면이 위로 올라온 부분과 아래로 내려간 부분이 있는데 이 방향을 주의해서 보아야 합니다. 기본 원칙은 드론의 프롭회전을 위에서 내려다보는 입장에서 프롭면이 위로 올라온 부분으로 회전이 이루어져야 양력이 발생한다는 것입니다.
드론의 운행 모드
이제 드론의 운행이 어떻게 이루어지는지 알아보겠습니다.
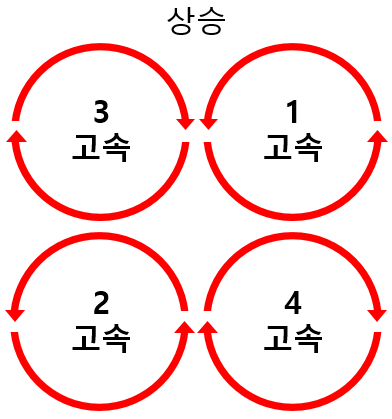
상승(Ascend) 모드: 4개의 모터가 고석으로 회전하면 수직으로 상승
호버링(Hovering) : 4개의 모터가 중력과 평형인 양력을 만들어내는 정도의 속력으로 회전하며 상하고도를 안정적으로 유지
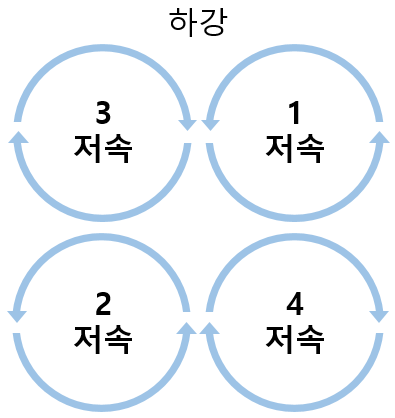
하강(Descend) 모드: 4개의 모터가 저속으로 회전하면 수직으로 하강
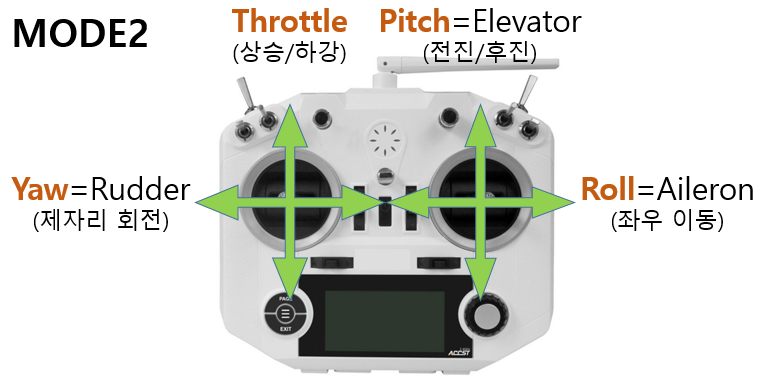
상승, 하강과 같은 수직 운행은 조종기의 왼쪽 스틱인 Throttle을 사용합니다. (Mode2 기준)
상승
호버링

하강
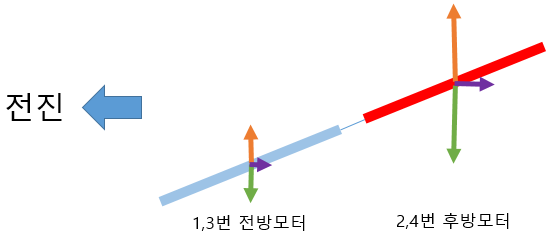
전진
전방의 1,3번 모터보다 후방의 2,4번 모터를 빠르게 회전시키면 토크가 상쇄된 상태에서 후방모터에서 생긴 추력에 의해 전방으로 날아가게 됩니다.
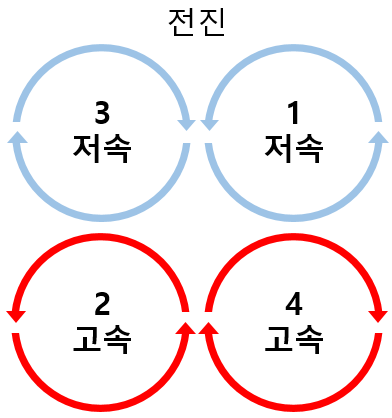
이때 드론의 모습을 측면에서 보면 2,4번 후방모터가 고속으로 회전하며 드론의 동체가 전방으로 기울진 형태가 됩니다. 이렇게 드론면이 기울어지게 되면 드론이 수평을 이루고 있을 때보다 상승하려는 양력이 약해지는데, 이 양력이 중력과 평형을 이루게 되면서 일정한 고도를 유지하게 됩니다. 이때 앞으로 전진하려는 추진력이 남게 되므로 드론이 전방으로 전진하게 되는 것입니다.
기울어진 정도를 더 크게 하면 어떻게 될까요? 위로 떠오르려는 양력은 더 작아지고 전진하려는 추력은 커지므로, 하강하면서 더 빠르게 전진하는 형태가 될 것입니다.’ 만약 고도를 유지하며 더 빠른 전진형태를 만들려면 양력을 보충해야 하므로 기울기를 크게 하고 모터의 회전을 더 빠르게 해주면 됩니다.
후진
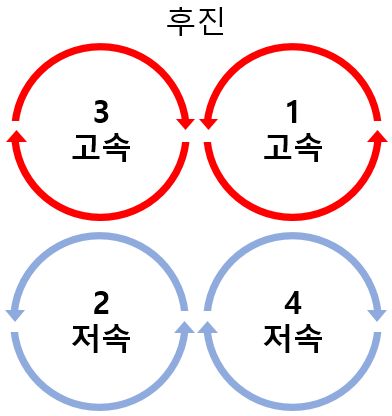
전진, 후진 같은 수평 운행은 조종기의 오른쪽 스틱을 위아래로 움직이며, 이를 Pitch(=Elevator)라고 합니다. (Mode2 기준)
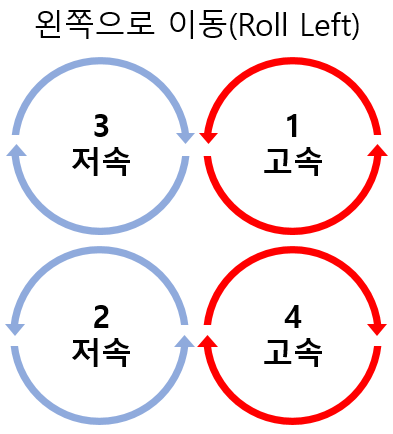
왼쪽으로 이동(Roll Left)
오른쪽으로 이동(Roll Right)
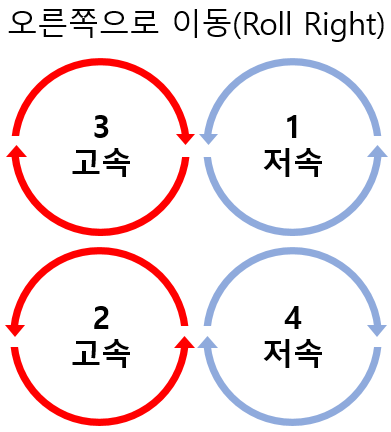
왼쪽, 오른쪽 이동 같은 수평 운행은 조종기의 오른쪽 스틱을 좌우로 움직이며, 이를 Roll(=Aileron)이라고 합니다. (Mode2 기준)
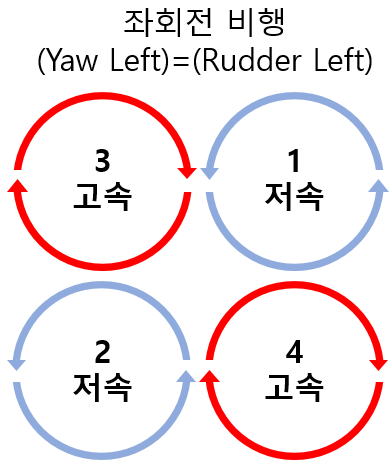
좌회전 비행
CCW로 회전하는 1,2번 모터가 저속으로 회전할 때, CW로 회전하는 3,4번 모터가 고속으로 회전하면 알짜회전이 CW가 되므로, CCW방향으로 토크가 발생하여 드론 동체가 CCW방향으로 회전한다.
우회전 비행
CW로 회전하는 3,4번 모터가 저속으로 회전할 때, CCW로 회전하는 1,2번 모터가 고속으로 회전하면 알짜회전이 CCW가 되므로, CW방향으로 토크가 발생하므로 드론 동체가 CW방향으로 회전한다.
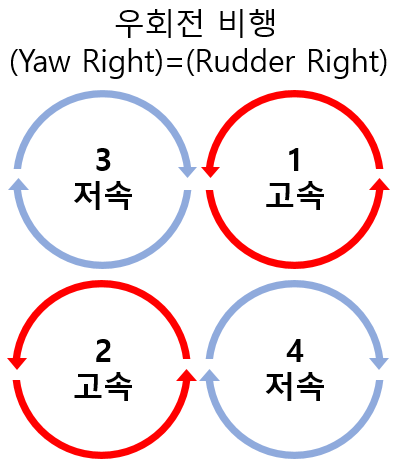
이러한 제자리 회전은 조종기의 왼쪽 스틱을 좌우로 움직이며, 이를 Yaw(=Rudder)라고 합니다. (Mode2 기준)
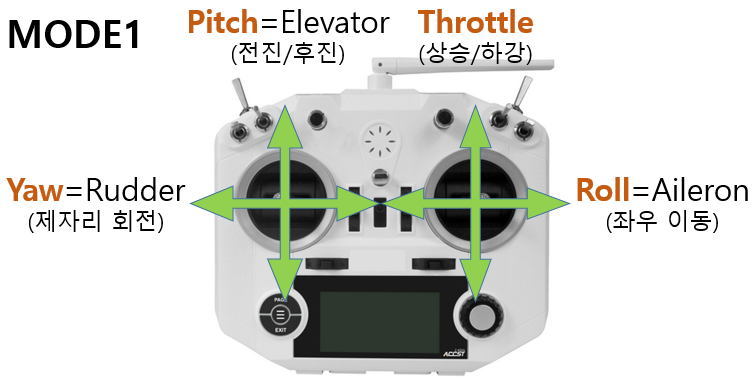
조종기 MODE
MODE1은 MODE2와 Throttle과 Pitch가 서로 반대입니다. MODE1은 과거에 많이 사용되었으나 요즘은 MODE2를 주로 사용합니다. 어떤 것이 더 좋다기 보다는 각기 운용의 장단점이 있으므로 사용자가 판단하여 사용하면 됩니다.