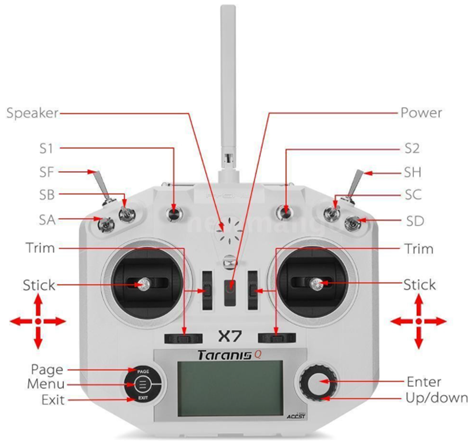
조종기 FrSky TaranisQ X7#
Button#
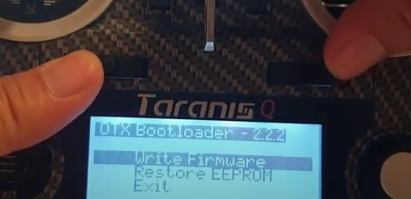
펌웨어 업데이트#
① 펌웨어 다운로드: https://www.open-tx.org
- Installation> News>에서 최신 버전 OpenTX 클릭
Download> SDCard> opentx-x7 클릭한 뒤, 최신버전의 zip파일 다운로드 후 압축해제
Download> 본인 PC의 OS Companion 다운로드 (펌웨어 버전에 맞는 Companion 선택해야 함)
② Yaw, Roll 트림을 동시에 서로 안쪽으로 민 상태로 전원버튼을 누르면, Bootloader로 진입함
③ TaranisQ X7 하단커버을 열고 miniUSB포트를 이용하여 PC와 연결하면,

- Taranis 드라이브와 USB 드라이브 폴더가 열림 (USB 드라이버는 조정기에 삽입되어 있는 miniSD카드를 의미)
④ [한글 음성 파일 업데이트]