샤시 조립#
샤시 부품#
| 번호 | 부품 | 사진 | 수량 | 용도 및 참고사항 |
|---|---|---|---|---|
| 1 | 전륜 회전축 |  | 2 | |
| 2 | 베어링(대) |  | 2 | |
| 3 | 스티어링 컵 |  | 2 | |
| 4 | 커플러 고정핀 |  | 2 | |
| 5 | 베어링(중) |  | 2 | |
| 6 | (전륜) 육각 커플러 |  | 2 | |
| 7 | 휠 |  | 4 | |
| 8 | 나이록 너트(M4) |  | 2 | |
| 9 | 십자형 육각 복스 |  | 1 | |
| 10 | 볼 조인트 커넥팅 로드 |  | 1 | 홀 간격 80.5mm 유지 |
| 11 | 볼 조인트 커넥팅 로드 |  | 1 | 홀 간격 51mm 유지 |
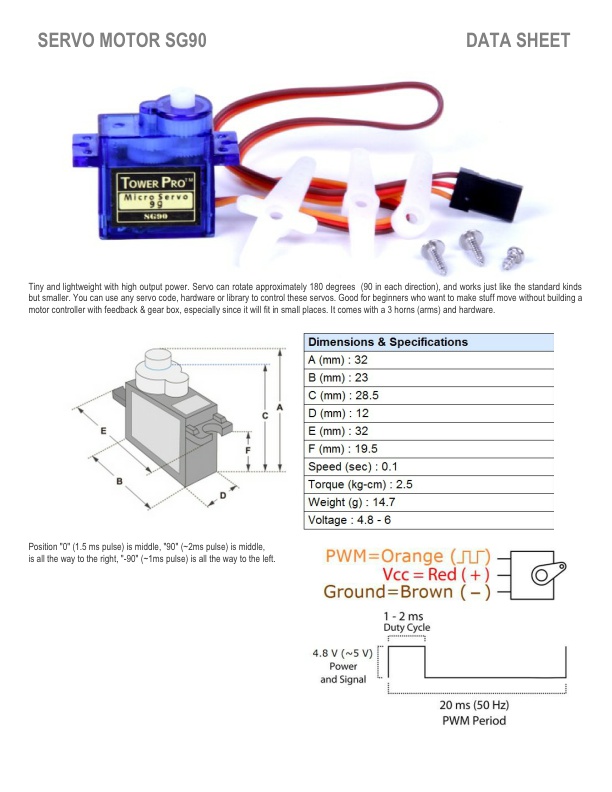
| 12 | 서보모터 MG996R |  | 1 | |
| 13 | ㄴ자 서보모터 브라켓 |  | 2 | |
| 14 | 휠 베이스 고정판 |  | 2 | |
| 15 | 서보 혼 |  | 1 | (볼트 포함) |
| 16 | 나이록 너트 (M2.5) |  | 1 | |
| 17 | 샤시 하판 | 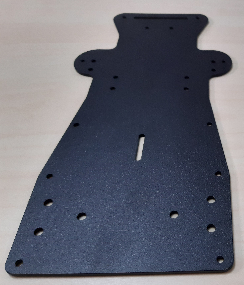 | 1 | |
| 18 | DC엔코더 모터 & 커넥터 | 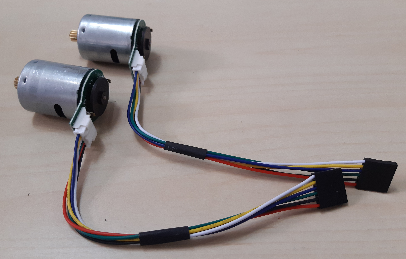 | 2 | |
| 19 | 모터 브라켓 |  | 2 | |
| 20 | 샤프트 |  | 2 | |
| 21 | 써클립 |  | 2 | |
| 22 | 샤프트 베어링 |  | 4 | |
| 23 | 기어 (무두볼트(Set Screw) 포함) | 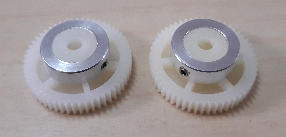 | 2 | |
| 24 | 육각 샤프트 커플링 커넥터 |  | 2 | |
| 25 | 범퍼 |  | 1 | |
| 26 | 샤시 상판 | 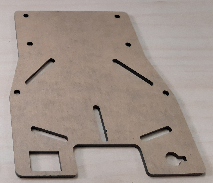 | 1 | |
| 27 | 락스위치 | 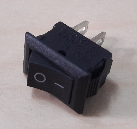 | 1 | |
| 28 | 황동 육각 스터드 (M3×22mm) |  | 6 | 휠 베이스 고정용 4개, 상판 고정용 2개 |
| 29 | 황동 육각 스터드 (M3×16mm) | 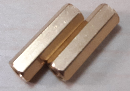 | 2 | 범퍼 고정용 2개 |
| 30 | 볼트 (Pan head, M4×6mm) |  | 6 | 모터 브라켓과 샤시 하판 고정용 6개 |
| 31 | 볼트 (Bind-Washer head, M3×6mm) |  | 10 | 서보모터와 서보모터 브라켓 고정용 4개, 서보모터 브라켓과 샤시하판 고정용 4개, 범퍼 고정용 2개 |
| 32 | 볼트 (Bind head, M3×8mm) |  | 14 | 육각 스터드 고정용 12개, 범퍼 고정용 2개 |
| 33 | 볼트 (Pan head, M2.5×10mm) |  | 7 | 커넥팅 로드 연결용 3개, 휠 베이스 연결용 4개 |
| 34 | 볼트 (Flat head, M2.5×5mm) |  | 4 | 모터와 모터브라켓 고정 |
| 35 | 육각렌치 |  | 1 | 기어 무두볼트용 |
| 36 | 저항 1K or 5.1K | 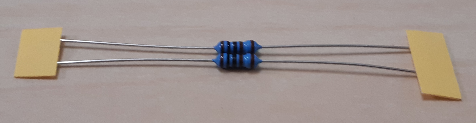 | 2 | (선택사항) 인코더 풀업저항 |
| 37 | 홀센서 칩 SH41F(SOT-23타입) | 2 | (선택사항) 홀 센서를 이중채널로 사용할 필요가 있는 경우에, 각 모터마다 1개씩 추가함 | |
| 총 | 36종 |
전륜 조향 휠 조립#
사진 오른쪽부터 차례대로 8개의 부품을 끼워 휠을 조립한다. (왼쪽휠/오른쪽휠 각각 1개씩, 총 2개 조립)