4WD Bluetooth#
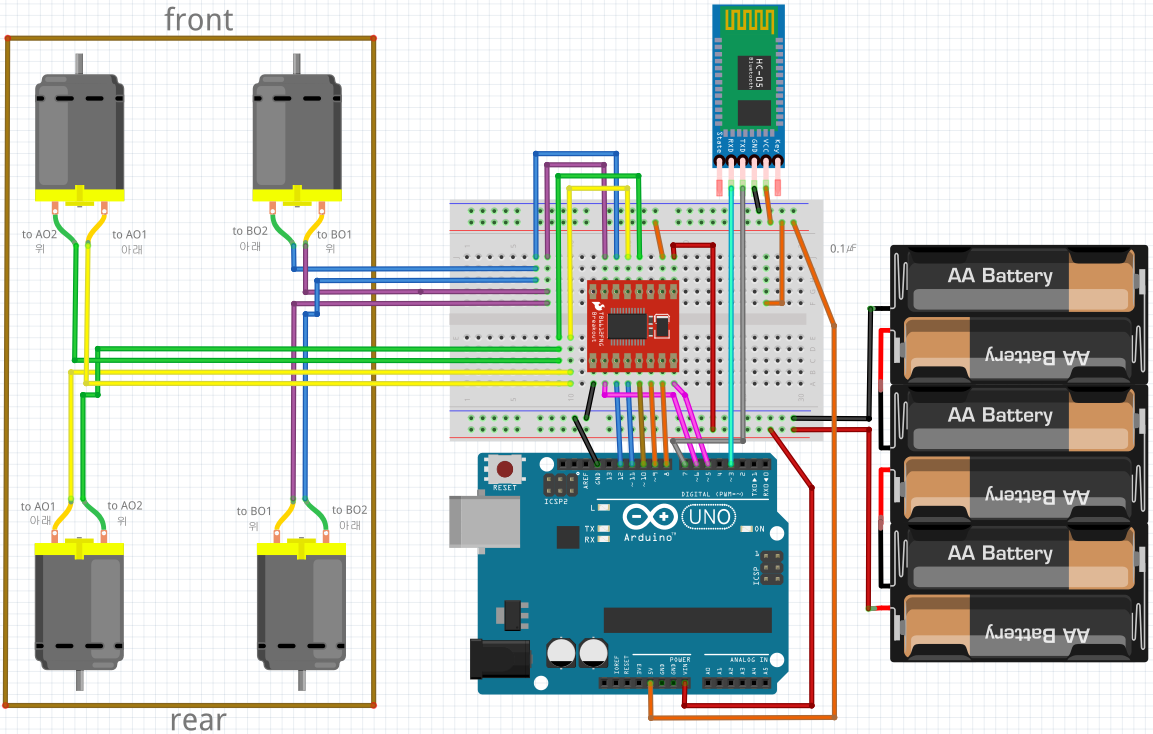
지금까지 배운 RC카, 블루투스 모듈 사용법, 컨트롤러 사용법을 종합하여 Bluetooth로 조종하는 4WD를 만들어 보겠습니다. IR리모트를 사용한 RC카를 베이스로 하여 IR수신부를 빼고, 블루투스 모듈인 HC-06만 연결하면 됩니다.
schematic#
Bluetooth Serial Controller 설정#
여기서는 4WD를 블루투스로 조종하기 위한 콘트롤러를 만들어 봅니다.
- 먼저 Bluetooth Serial Controller를 실행시키세요. (블루투스 페어링이나 앱 설치방법은 이전의 글을 참고하세요.) 아래화면은 TERMINAL Mode인 상태입니다. 여기서 스페너 모양 아이콘을 눌러 PREFERCE로 진입하세요.

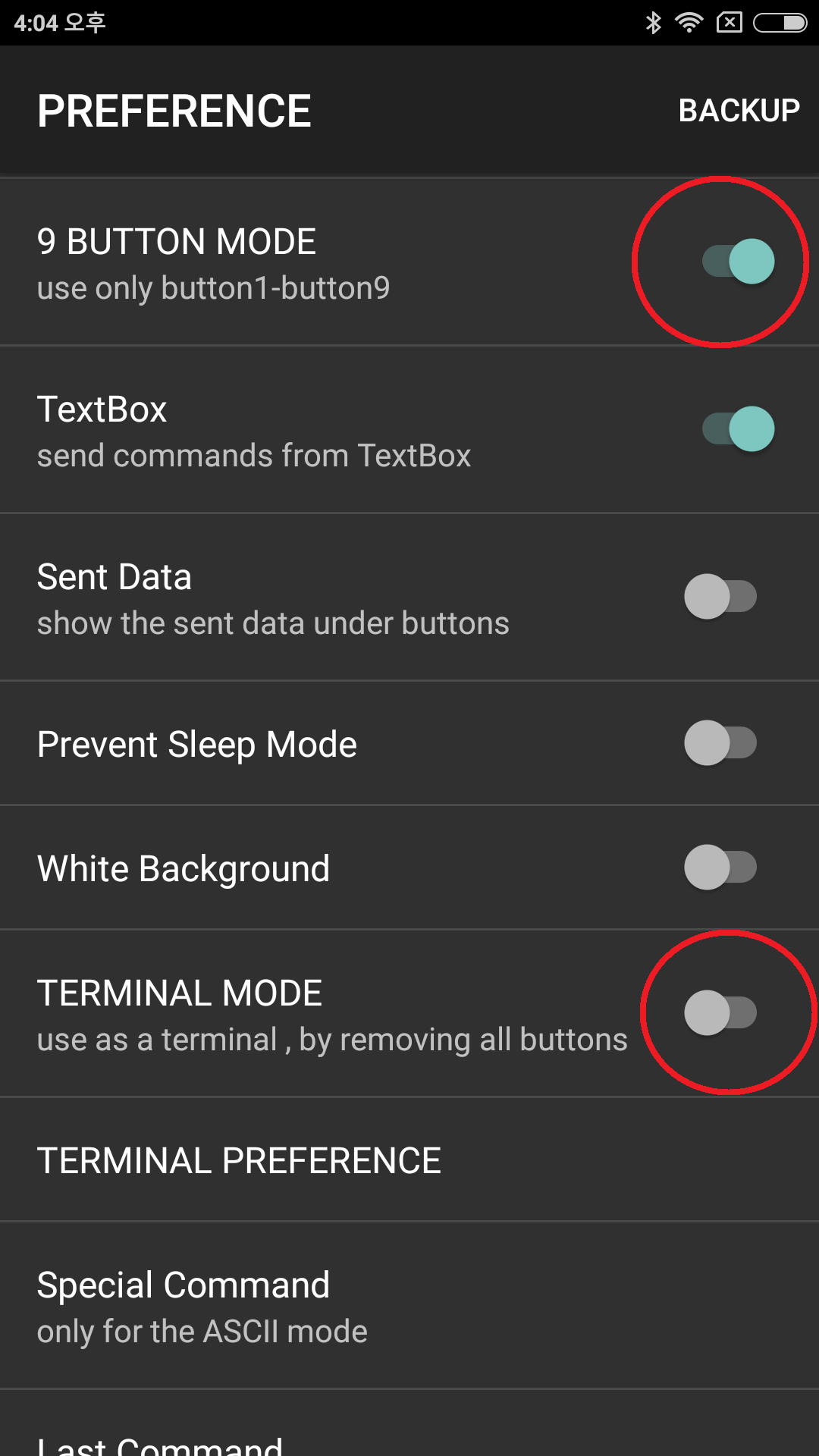
- PREFERENCE 화면에서 아무곳이나 누른 뒤, 위로 스크롤하여
- 9 BUTTON MODE를 활성화 시키고, TERMINAL MODE를 꺼주세요.
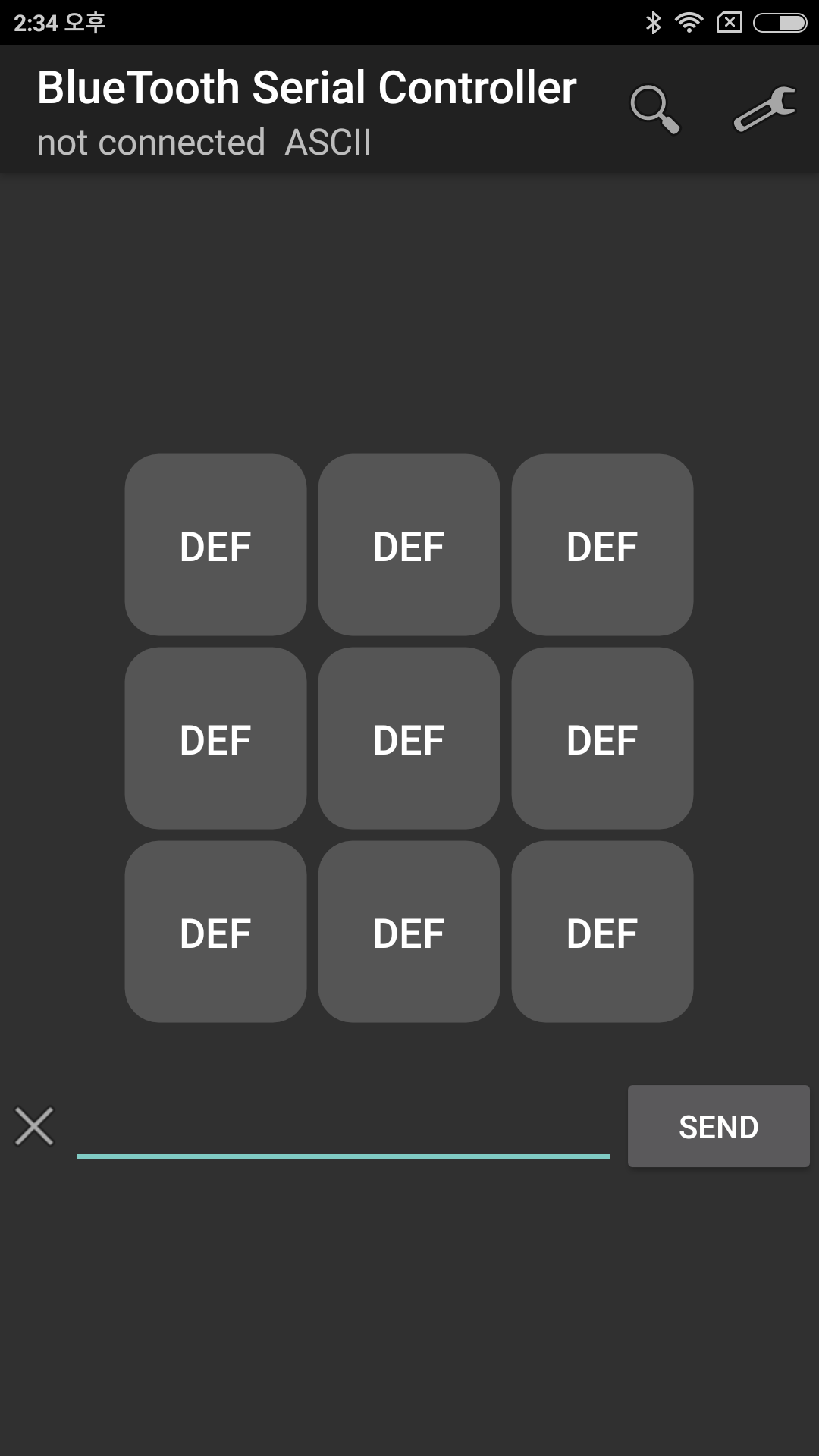
- 그러면 이런 화면이 나타납니다. 이제 각각의 버튼을 정의해보겠습니다.
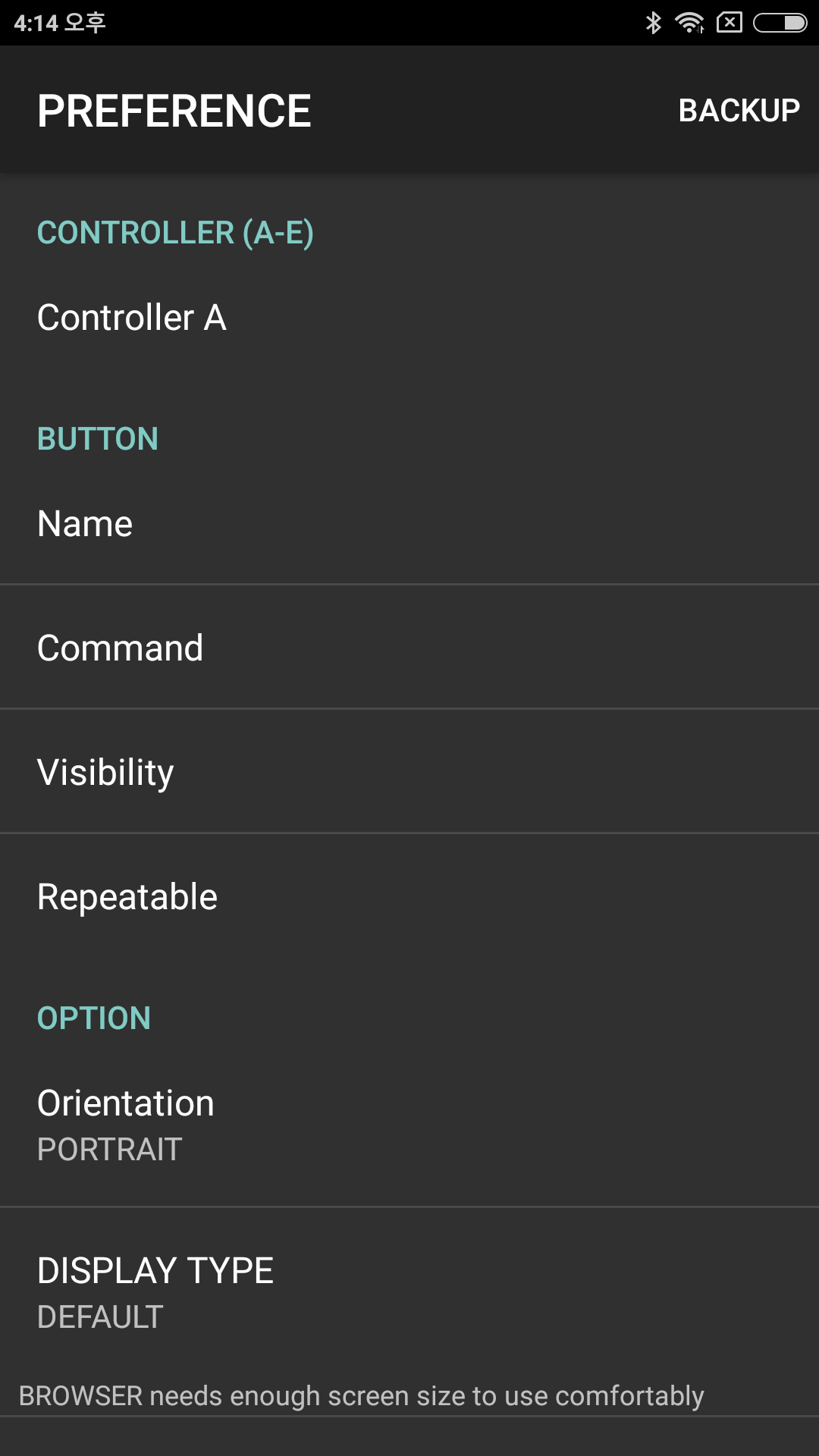
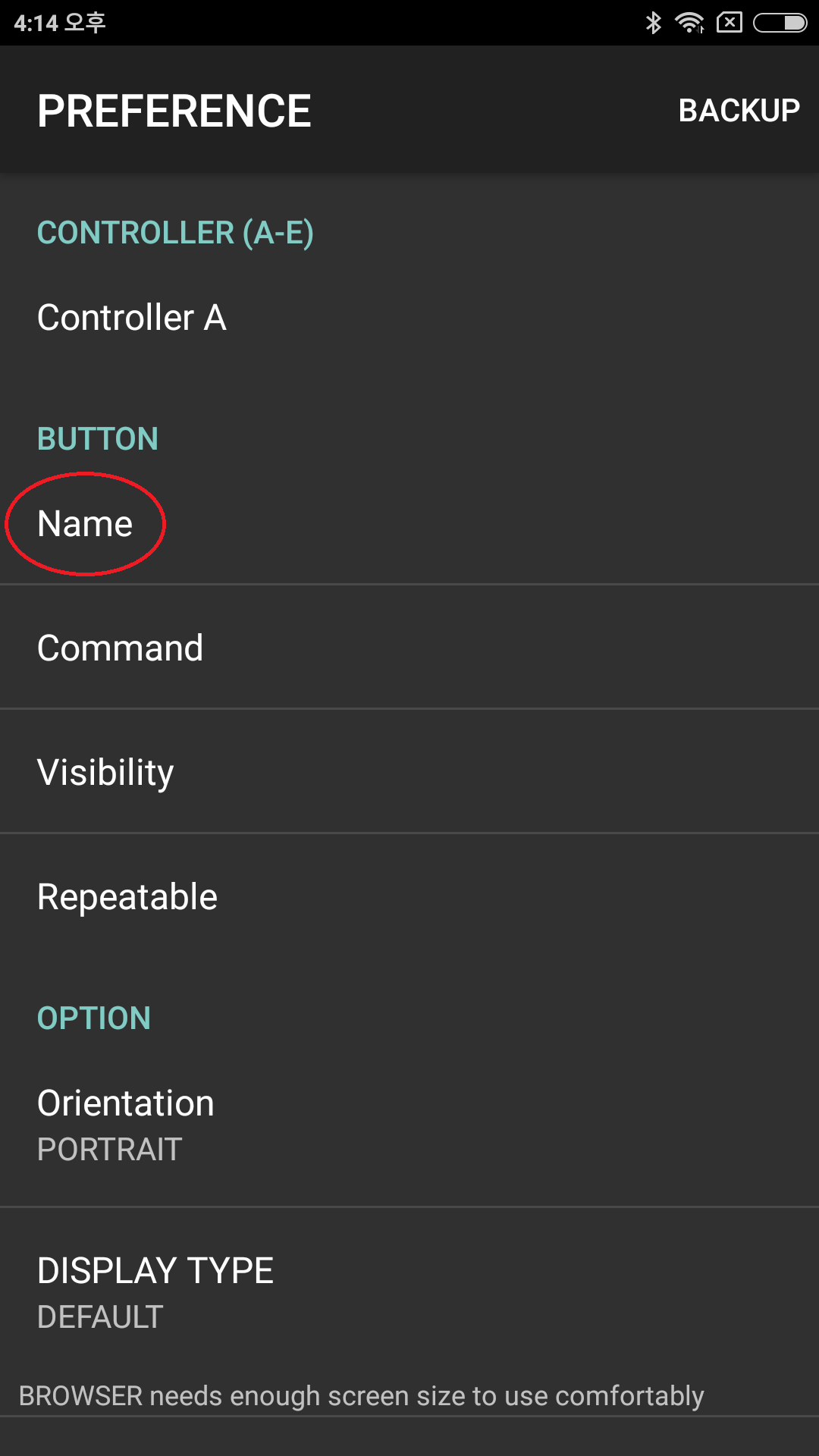
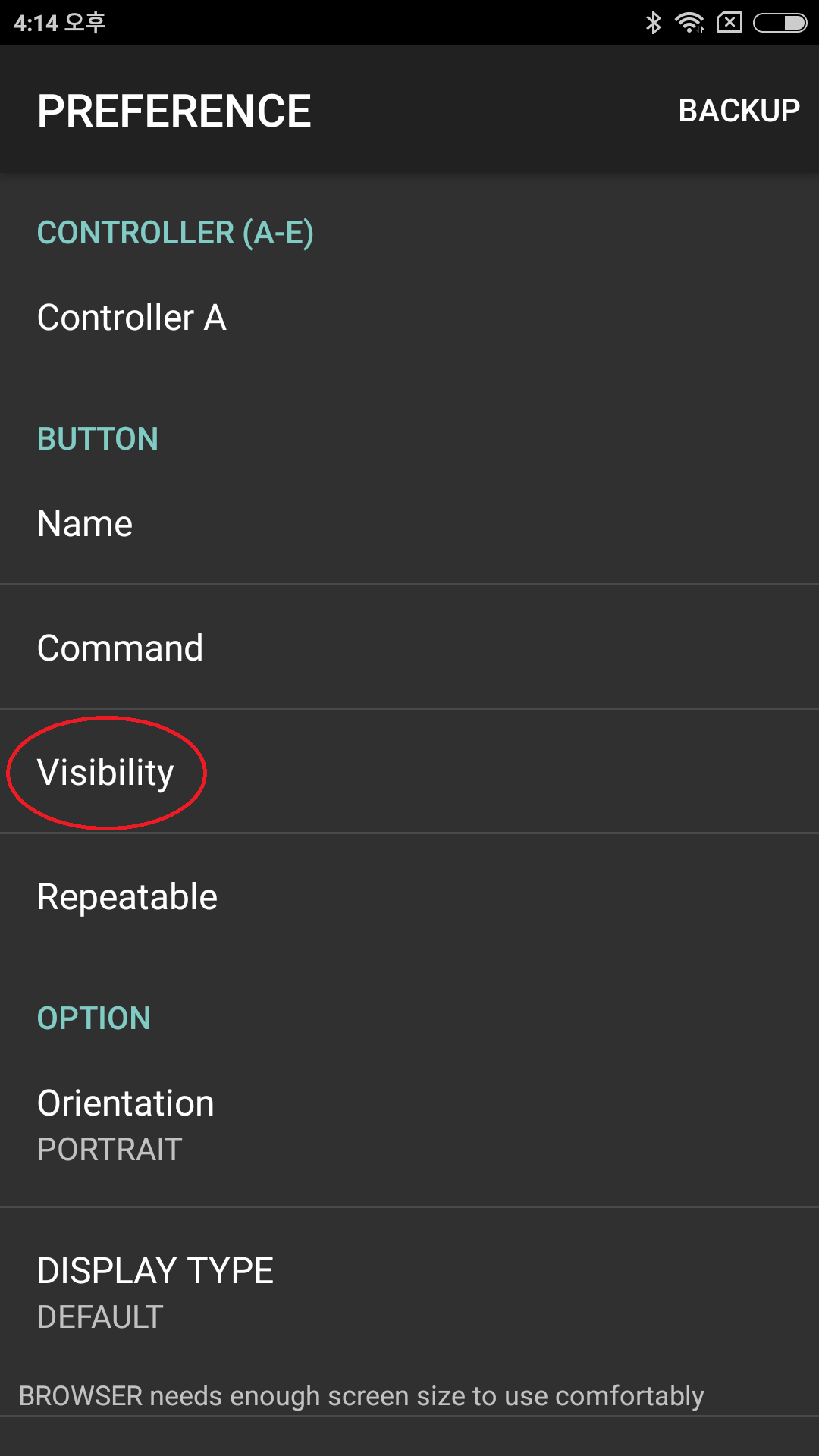
- 다시 스페너 모양 아이콘을 눌러 PREFERENCE로 들어간 뒤, BUTTON-Name을 선택합니다.
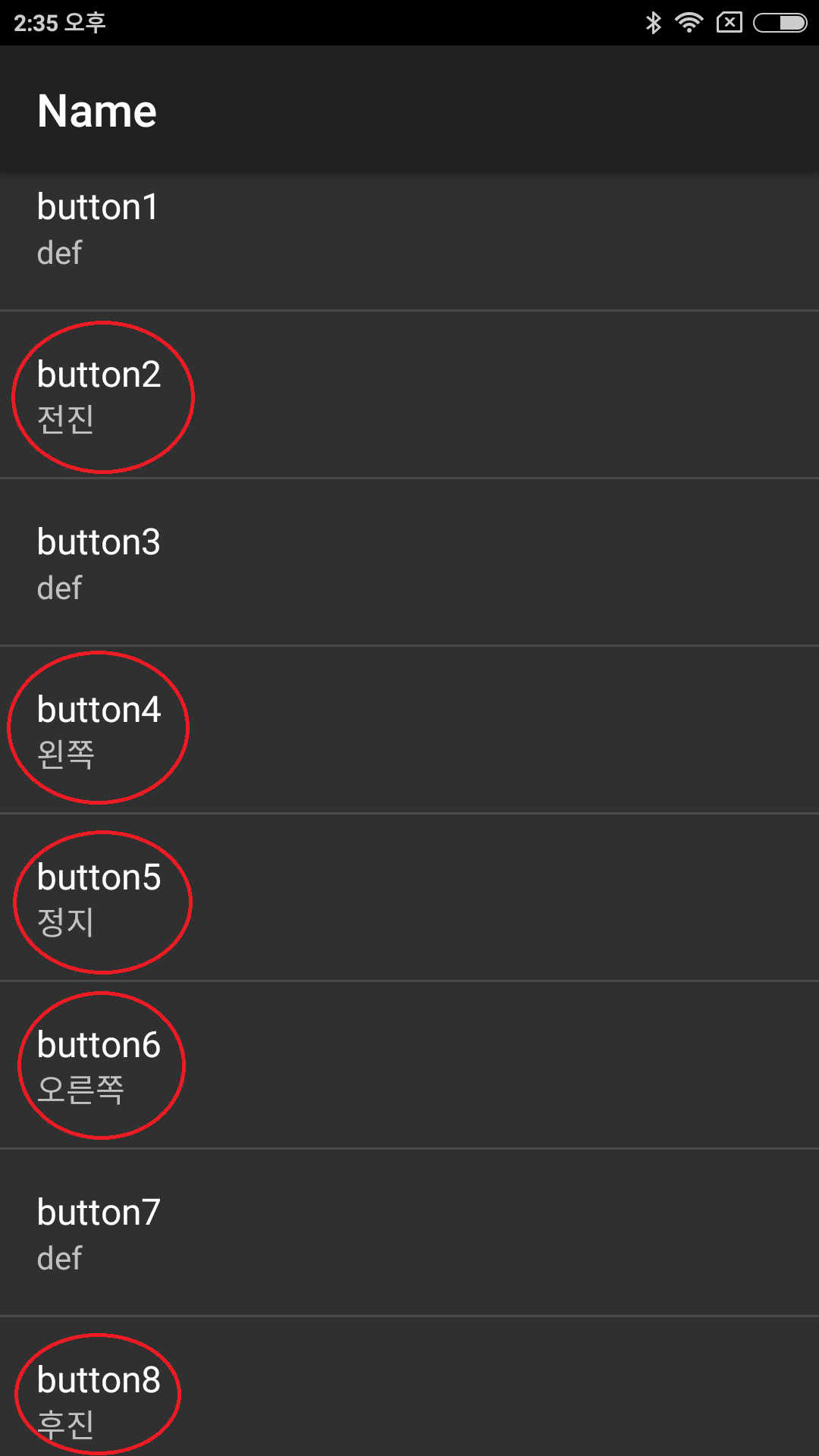
- button2, button4, button5, button6, button8을 각각 누른 뒤, 각 버튼 별로 ‘전진’, ‘왼쪽’, ‘정지’, ‘오른쪽’, ‘후진’이라고 이름을 붙여줍니다.
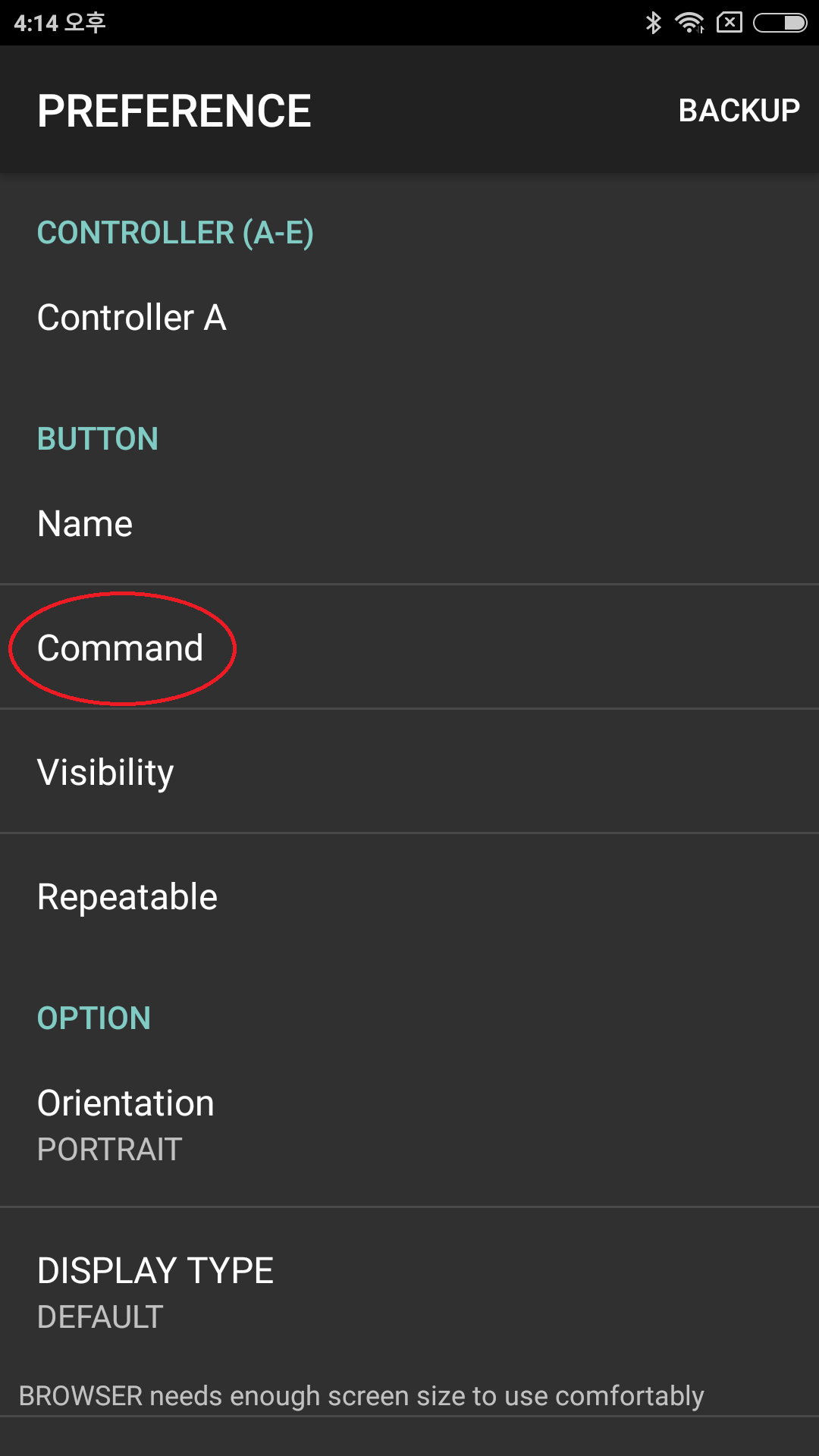
- 다시 PREFERENCE에서 Command를 누르세요.
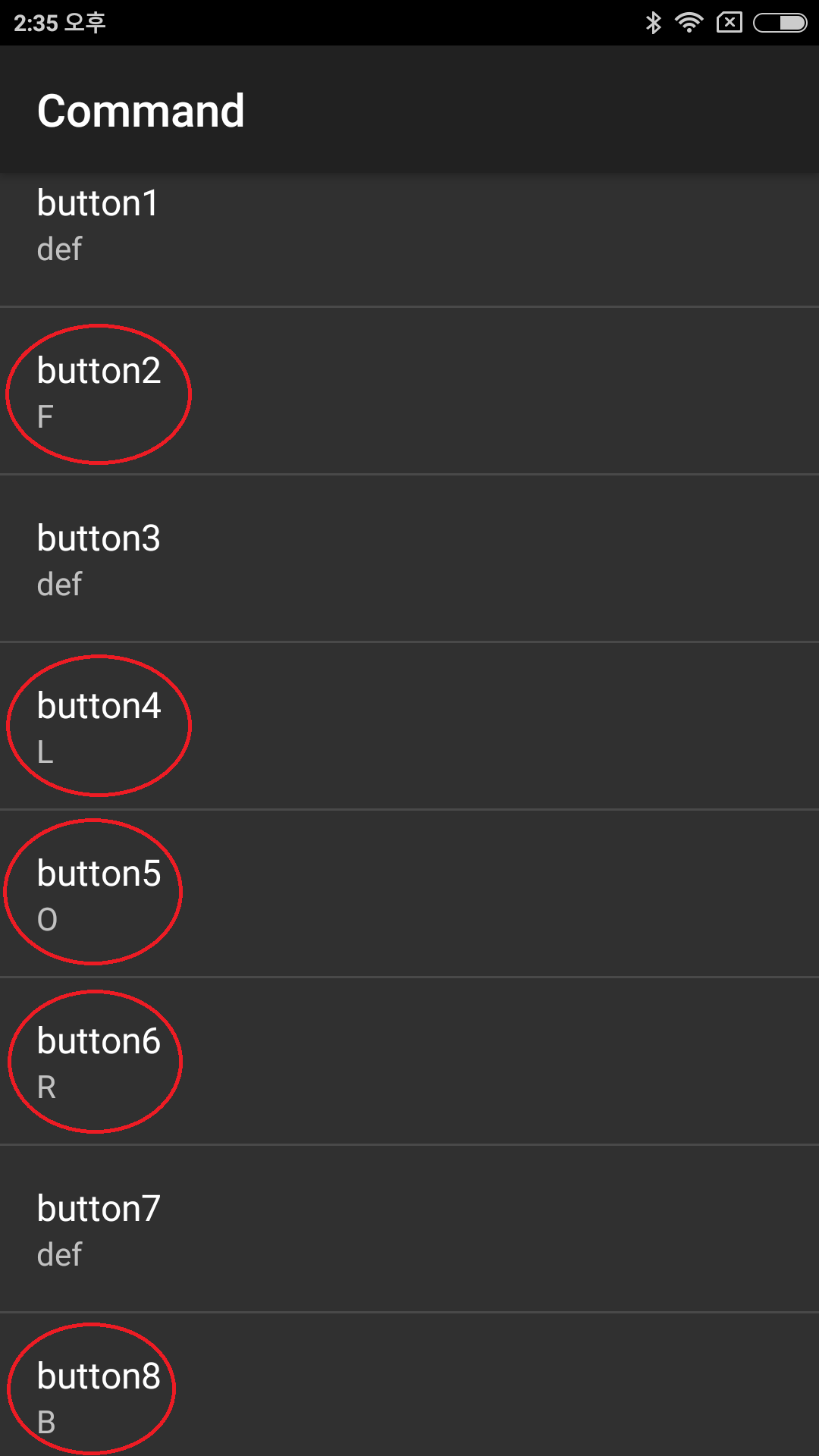
- Command에서 정의해주는 값이 제일 중요한데요. 각 버튼을 누를때, 아두이노로 전달되는 값을 정의해주는 것이기 때문입니다. button2, button4, button5, button6, button8을 각각 누른 뒤, 각 버튼 별로 ‘F’, ‘L’, ‘O’, ‘R’, ‘B’이라고 입력값을 넣어주세요. 이 값은 스케치 작성시 사용해야 하므로 꼭 기억해두어야 합니다.
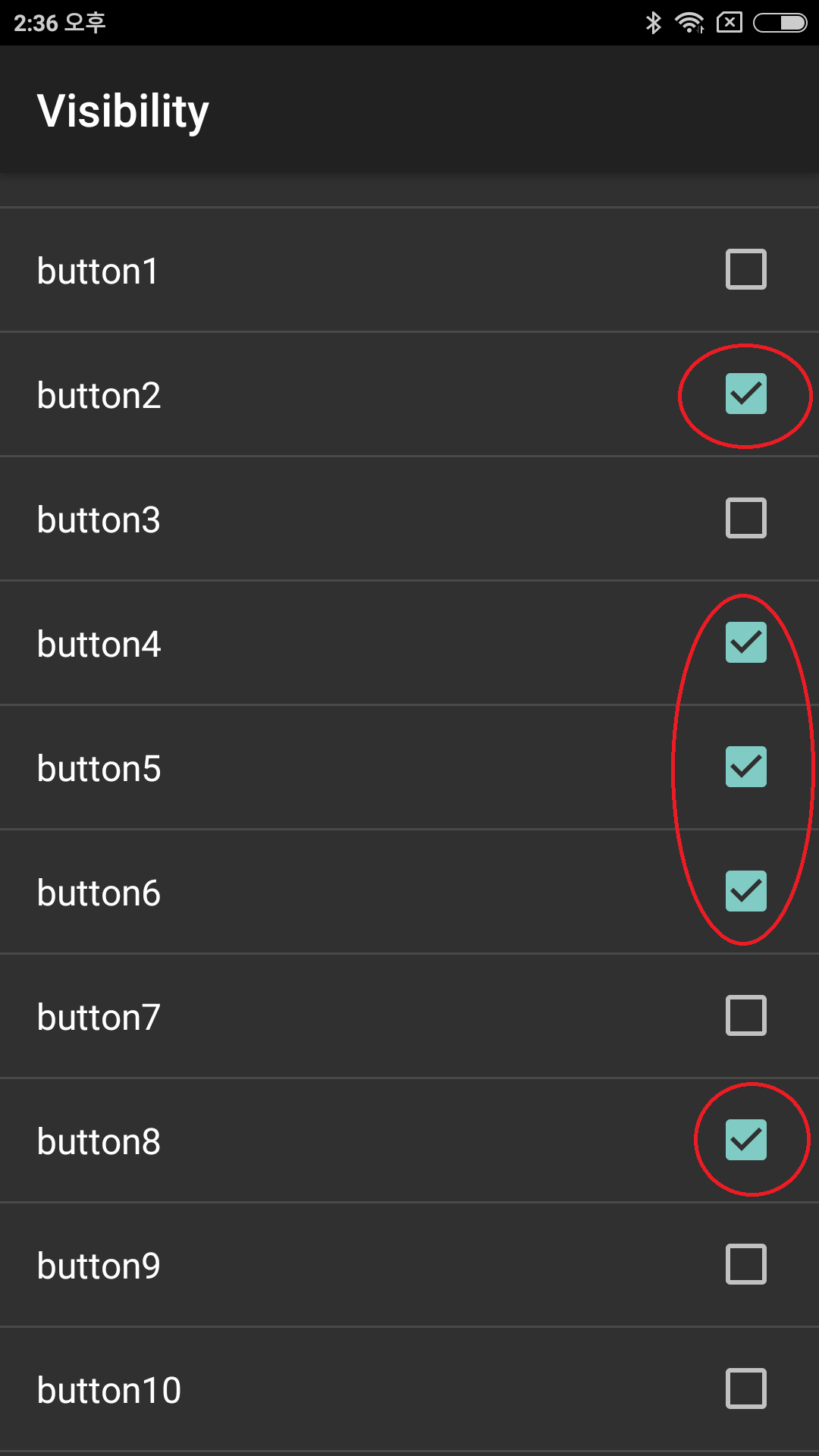
- 이제 Visibility로 갑니다.
- 여기서는 필요없는 버튼을 지워줄 수 있어요. 실제 사용되는 버튼에만 체크하고, 나머지 버튼은 체크 해제합니다.
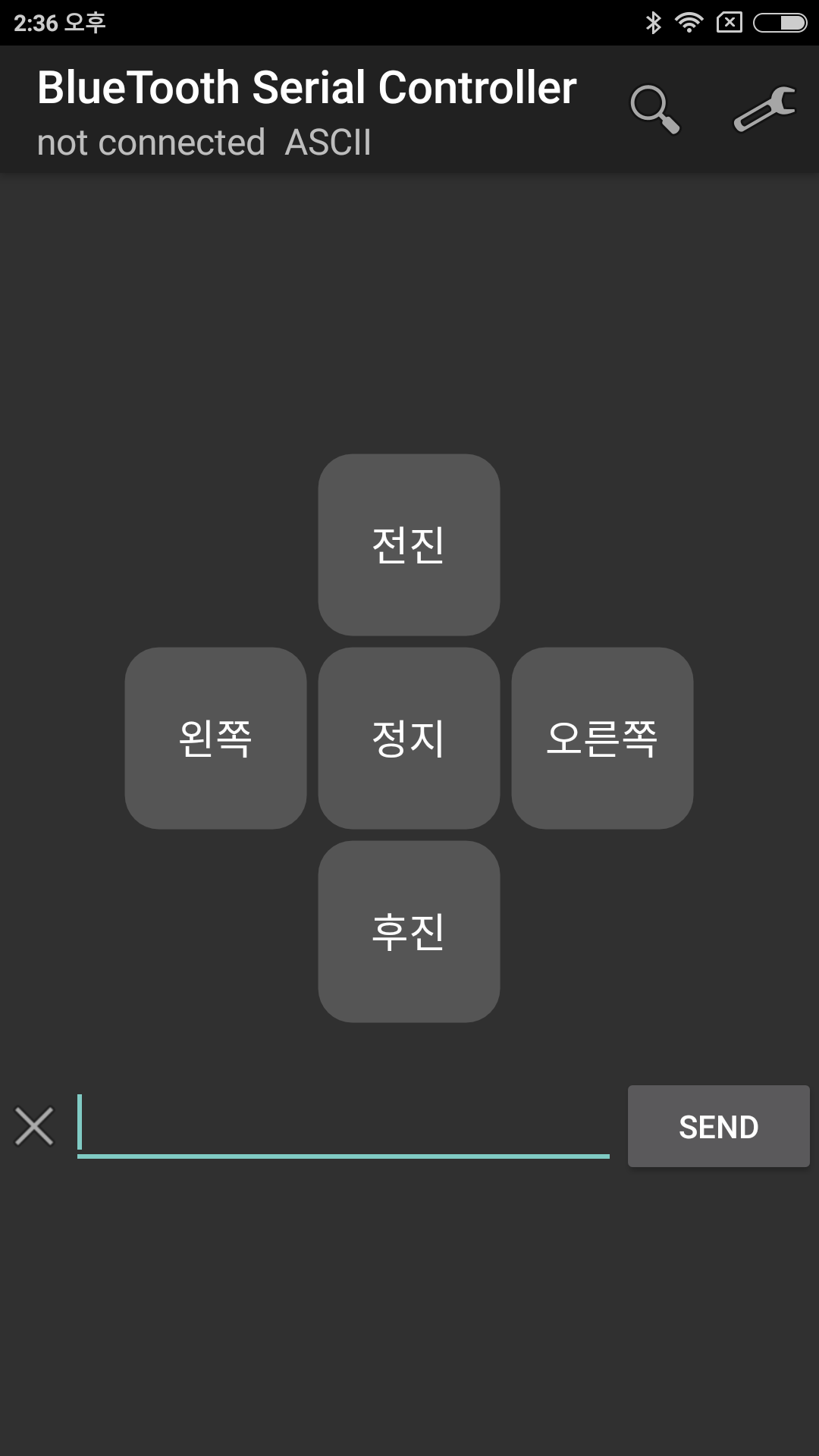
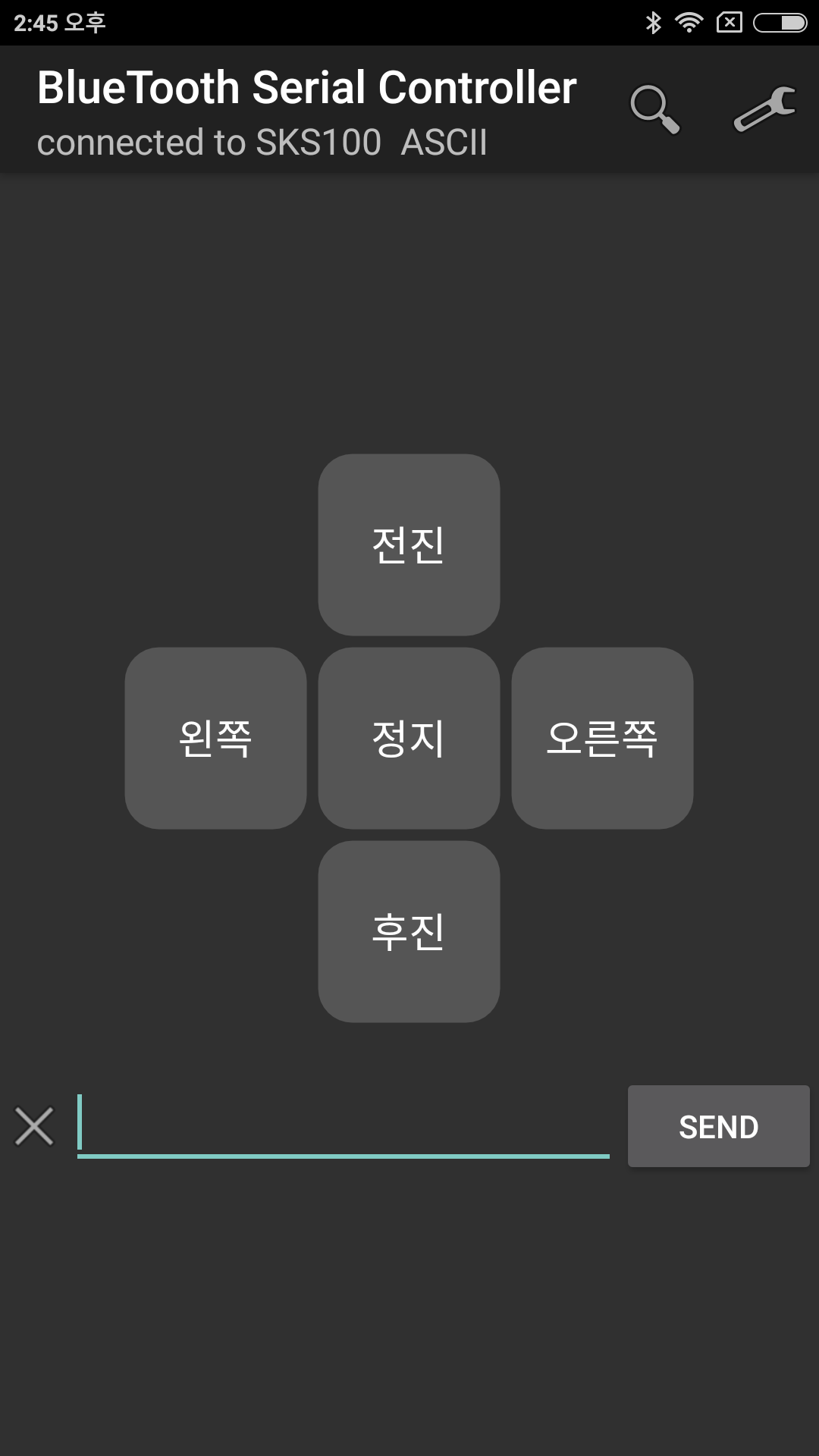
- 그러면, 아래와 같은 멋진 블루투스 컨트롤러가 나타납니다.
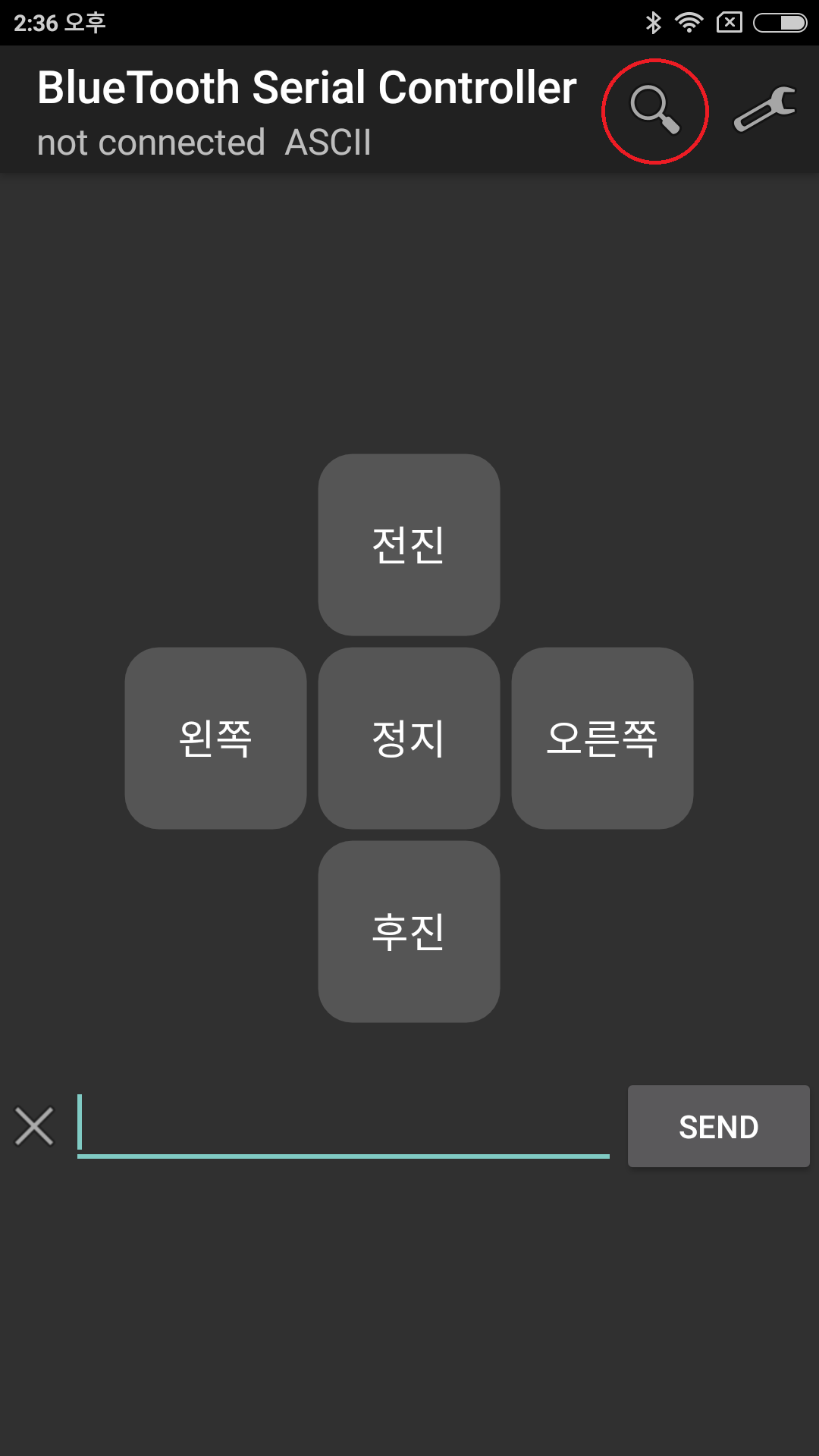
- 이 상태에서 돋보기 모양 아이콘을 눌러 HC-06에 접속해 봅니다. 여기서부터는 블루투스 페어링 과정에서 설명했던 부분과 똑같습니다.
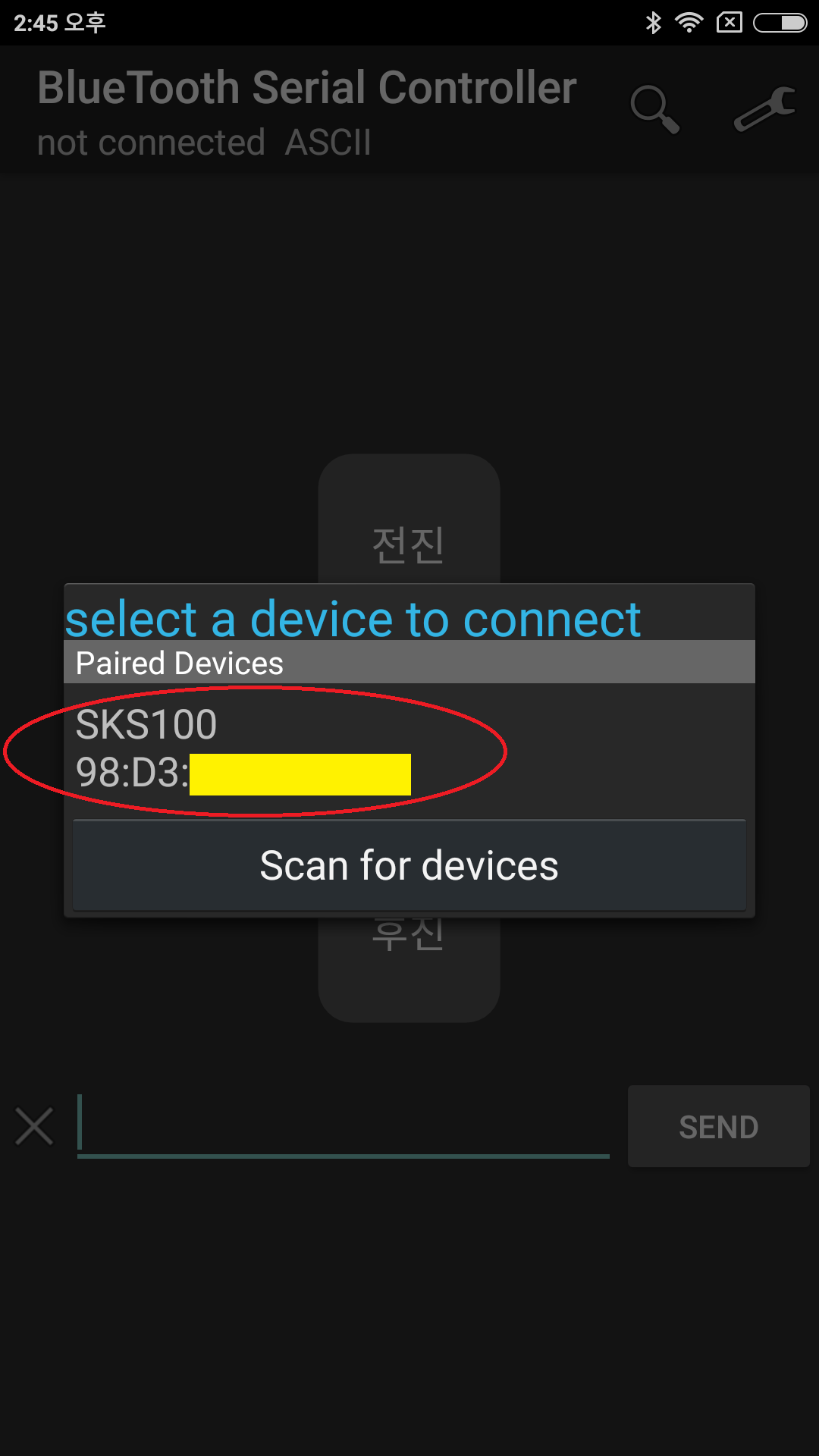
- 모듈ID인 SKS100을 누르면 페어링을 시도하고요.
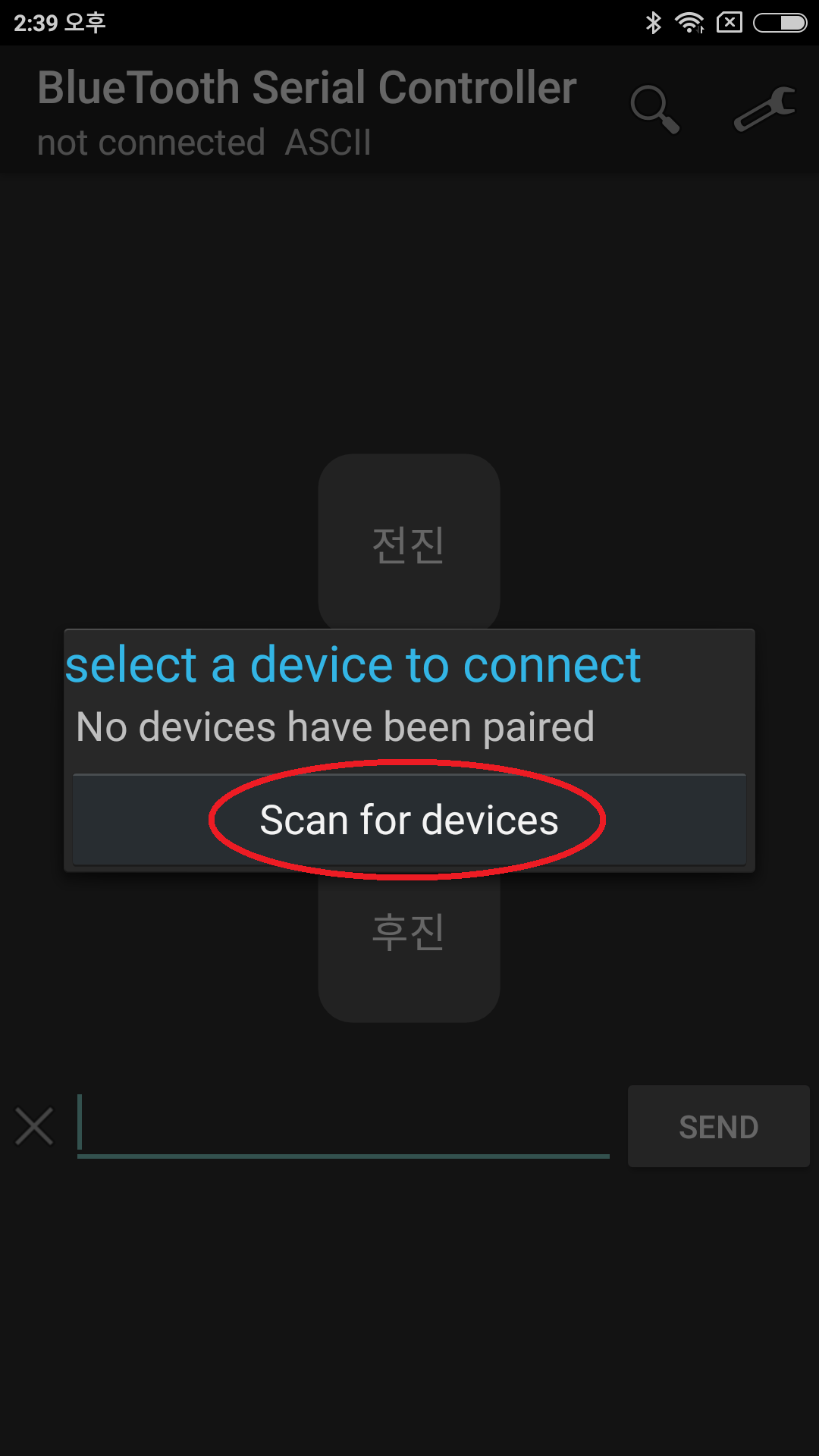
- 만일 페어링할 모듈이 나타나지 않으면, Scan for devices로 모듈을 찾아 페어링을 해봅니다.
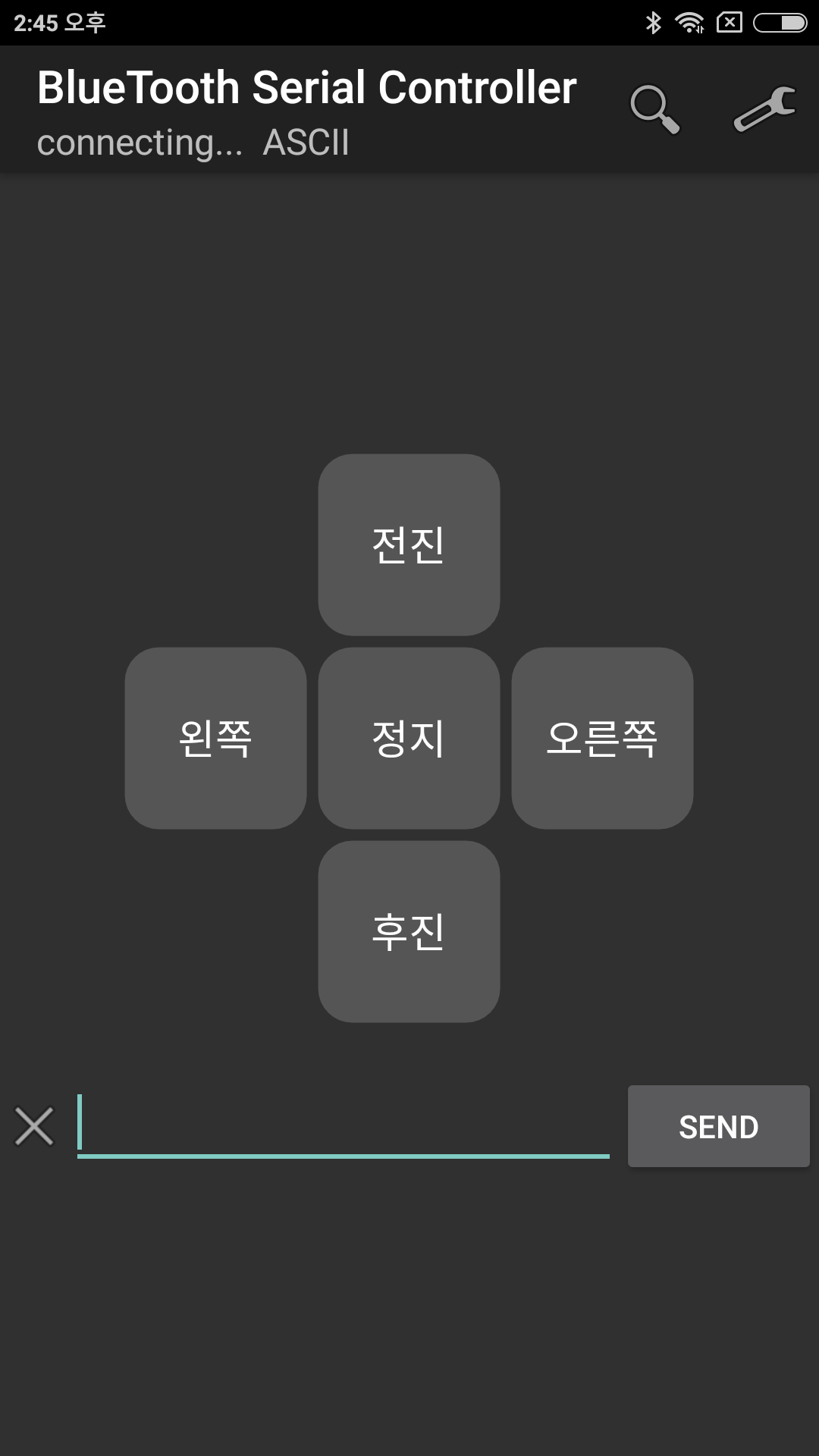
- 페어링을 시도하는 중이네요.
- 페어링 완료! 이제 컨트롤러 사용을 위한 모든 준비과정이 완료되었습니다.
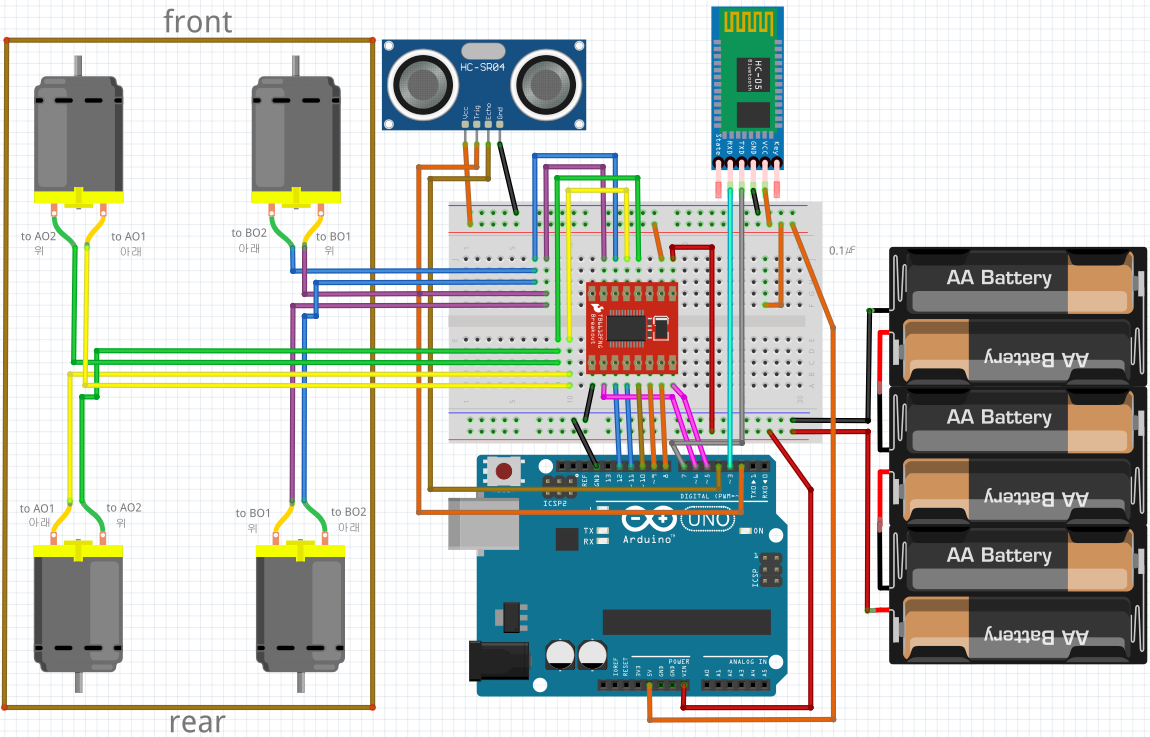
4WD 블루투스 초음파센서 자동차#
위 회로에 초음파 센서 하나만 덧붙여봅니다. 50cm 이내에 물체가 접근하면 후진했다가 정지하도록 되어있습니다. (실제로는 50cm보다 훨씬 짧은 거리내에서 후진을 시작하네요.)
schematic#
sketch#
//Initialize Bluetooth
#include <SoftwareSerial.h>
SoftwareSerial BTSerial(7, 3); // HC-06 TX,RX
// Initialize TB6612FNG Motor drive
int STBY = 10; // STBY pin on TB6612FNG. Must be HIGH to enable motor
int A_PWM = 5; // Left motor speed control using analogWrite() function. Value between 0 - 255
int A_IN1 = 9; // Left motor - LOW should go forward
int A_IN2 = 8; // Left motor - HIGH should go forward
int B_PWM = 6; // Right motor speed control using analogWrite() function. Value between 0 - 255
int B_IN1 = 11; // Right motor - LOW should go forward
int B_IN2 = 12; // Right motor - HIGH should go forward
int L_MaxSpeed = 255; //set motor speed to max speed
int R_MaxSpeed = 255; //set motor speed to max speed
int L_TurnSpeed = 128; //set motor speed to max speed
int R_TurnSpeed = 128; //set motor speed to max speed
int LR_Direct = 0; //for Direction (0:clockwise, 1:count-clockwise)
// Initialize Ultrasonic Sensor
#define TRIG 2
#define ECHO 4
char val;
long val_distance;
void setup() {
pinMode(A_PWM, OUTPUT); // Motor
pinMode(A_IN1, OUTPUT);
pinMode(A_IN2, OUTPUT);
pinMode(B_PWM, OUTPUT);
pinMode(B_IN1, OUTPUT);
pinMode(B_IN2, OUTPUT);
pinMode(STBY, OUTPUT);
pinMode(TRIG, OUTPUT); // Ultrasonic Sensor
pinMode(ECHO, INPUT);
Serial.begin(9600);
BTSerial.begin(9600); // Start Bluetooth
while (!BTSerial.available()) { // 처음 입력이 있을때까지
stop(); // 정지
}
}
void loop() {
distance(); // 거리 측정
Serial.println(val_distance); // 거리 출력
if (BTSerial.available()) { // Check for Bluetooth input
val = BTSerial.read(); // 입력값 val에 저장
Serial.println(val); // 입력값 출력
}
if (val_distance > 50) { // 거리가 50cm 이상이면 입력값 실행
parseCommand(val); // parse the input
} else { // 거리가 50cm 이내이면
stop();
delay(20);
b_stop(); // 거리가 50cm 이상이 될 때까지 후진 후, 정지
}
delay(50);
}
void parseCommand(char input) {
switch (input) {
case 'F':
go_forward();
break;
case 'B':
go_backward();
break;
case 'L':
if(LR_Direct==0) {
go_f_left();
} else if(LR_Direct==1) {
go_b_left();
}
break;
case 'R':
if(LR_Direct==0) {
go_f_right();
} else if(LR_Direct==1) {
go_b_right();
}
break;
case 'O':
stop();
break;
}
delay(50);
}
void distance() {
digitalWrite(TRIG, LOW); // Start Ultrasonic sensor
delayMicroseconds(2);
digitalWrite(TRIG, HIGH);
delayMicroseconds(10);
digitalWrite(TRIG, LOW);
val_distance = pulseIn(ECHO, HIGH) / 58.2; // 거리 측정
}
// Move specific motor at speed and direction
// motor: A(Left) -> 0, B(Right) -> 1
// speed: 0 is off, and 255 is full speed
// direction: 0 clockwise, 1 counter-clockwise
void move(int motorLR, int speed, boolean inPin1, boolean inPin2) {
digitalWrite(STBY, HIGH); // Disable Standby
if (motorLR == 0) {
analogWrite(A_PWM, speed);
digitalWrite(A_IN1, inPin1);
digitalWrite(A_IN2, inPin2);
}
if (motorLR == 1) {
analogWrite(B_PWM, speed);
digitalWrite(B_IN1, inPin1);
digitalWrite(B_IN2, inPin2);
}
}
void go_forward() {
Serial.println("F");
move(0, L_MaxSpeed, 0, 1); // Left motor, Left Speed, forward(0,1)
move(1, R_MaxSpeed, 0, 1); // Right motor, Right Speed, forward(0,1)
LR_Direct = 0; // Forward
delay(100);
}
void go_backward() {
Serial.println("B");
move(0, L_MaxSpeed, 1, 0); // Left motor, Left Speed, backward(1,0)
move(1, R_MaxSpeed, 1, 0); // Right motor, Right Speed, backward(1,0)
LR_Direct = 1; // Backward
delay(100);
}
void go_f_left() {
Serial.println("F_L");
move(0, L_TurnSpeed, 0, 1); // Left motor, Left Speed, forward(0,1)
move(1, R_MaxSpeed, 0, 1); // Right motor, Right Speed, forward(0,1)
delay(100);
}
void go_b_left() {
Serial.println("B_R");
move(0, L_TurnSpeed, 1, 0); // Left motor, Left Speed, backward(1,0)
move(1, R_MaxSpeed, 1, 0); // Right motor, Right Speed, backward(1,0)
delay(100);
}
void go_f_right() {
Serial.println("F_R");
move(0, L_MaxSpeed, 0, 1); // Left motor, Left Speed, forward(0,1)
move(1, R_TurnSpeed, 0, 1); // Right motor, Right Speed, forward(0,1)
delay(100);
}
void go_b_right() {
Serial.println("B_R");
move(0, L_MaxSpeed, 1, 0); // Left motor, Left Speed, backward(1,0)
move(1, R_TurnSpeed, 1, 0); // Right motor, Right Speed, backward(1,0)
delay(100);
}
void b_stop() {
Serial.println("B_STOP");
while (val_distance < 50) { // 거리가 50cm 이내인 경우 반복
go_backward(); // 후진
delay(100);
distance(); // 거리를 다시 측정
delay(10);
}
while (!BTSerial.available()) { // 입력이 없으면
stop(); // 정지상태 유지
}
LR_Direct = 0; // 앞으로 갈 준비
}
void stop() {
Serial.println("STOP");
digitalWrite(STBY, LOW); // Enable Standby
}