생활속에서 가장 밀접하게 쓰이는 IR(Infra Red, 적외선) 리모컨의 사용에 대해서 알아본다. 리모컨 작동을 위해서는 기본적으로 IR 신호를 내보내는 리모컨본체와 이 본체에서 내보내는 신호를 받아들이는 IR 리시버가 필요하다.
기본 사용법#
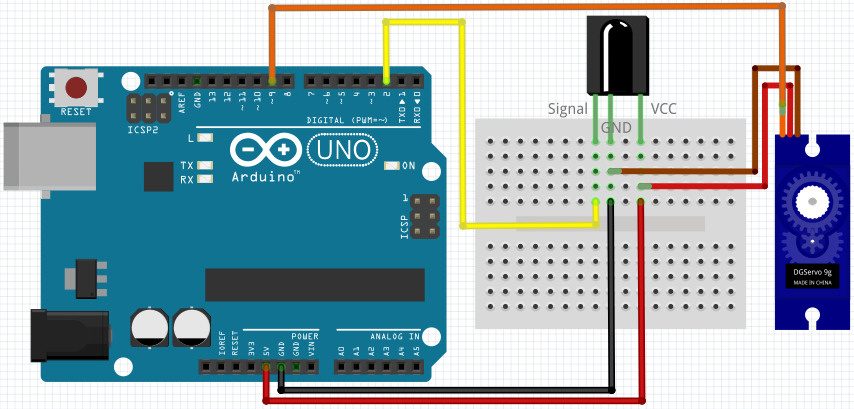
schematic#
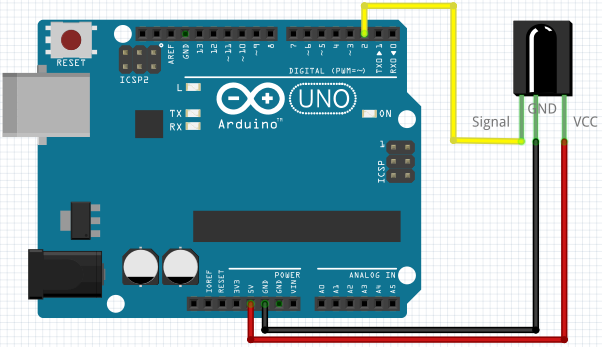

위 그림에서 IR 리시버에 있는 핀은, IR모듈이 아닌 단일 부품형태의 리시버 일때 핀의 순서이다.
IR 리시버 모듈을 사용하는 경우#
아두이노 학습용으로 판매하는 IR 리시버는 브레드보드에 바로 붙일 수 있도록 조그만 PCB가 달린 모듈의 형태로 판매되는 경우가 많으며, 이 경우에는 PCB보드에 써있는 글씨를 보고 각 핀에 맞게 아두이노에 연결해야한다. 문제는 PCB에 어느 핀인지를 나타내는 글자가 잘 안보인다는 것!
- Signal : PCB에 S라고 표기되어 있는 쪽
- VCC : 대부분 가운데에 있는 경우가 많았음
- GND : S라고 표기된 부분의 반대쪽이라고 생각하면 된다. (-) 마이너스 표기가 작게 되어 있음
Pin Map#
| Arduino | IR Reciever 모듈 사용시 | IR Reciever 단일부품 |
|---|---|---|
| 2 | S (Signal) | (둥근 모양을 마주보고) 왼쪽 |
| 5V | 표기 되어 있지 않음 | (둥근 모양을 마주보고) 오른쪽 |
| GND | - | (둥근 모양을 마주보고) 가운데 |
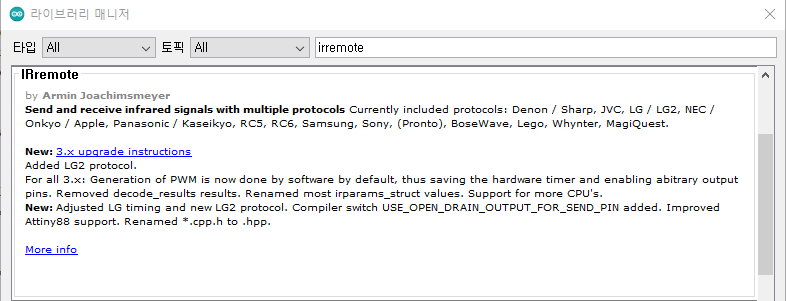
라이브러리 준비하기#
스케치> 라이브러리 포함하기> 라이브러리 관리> 라이브러리 매니저
검색어 irremote 입력
“IRremote by Armin Joachimsmeyer” 라이브러리 설치/업데이트
- 스케치> 라이브러리 포함하기> IRremote 를 선택하면, IR remote 기능을 사용하는데 필요한 라이브러리가 스케치에 include 된다.
#include <IRremote.h>리모컨 버튼의 고유값 알아내기#
- old MSB-first 32bit IR data code
- new LSB-first 32bit IR data code
리모컨 코드값은 위의 2가지 형태로 구분된다. 여기서는 기본적으로 MSB-first 방식을 사용하도록 한다. 아래 스케치를 이용하면 간단하게 MSB-first code 값만 출력된다. (시리얼 모니터 Baudrate 115200)
sketch#
#include <IRremote.h>
int RECV_PIN = 2; // IR 리시버 핀 설정
IRrecv irrecv(RECV_PIN); // IR 리시버 선언
decode_results results; // 수신결과 저장
void setup() {
Serial.begin(115200);
irrecv.enableIRIn(); // IR 리시버 시작
}
void loop() {
if(irrecv.decode(&results)) { // 리시버가 받은 값이 있으면
Serial.print("0x");
Serial.println(results.value, HEX); // 버튼 HEX값을 콘솔에 출력
delay(500);
irrecv.resume(); // 다음 값을 받기 위해 준비
}
}serial monitor#
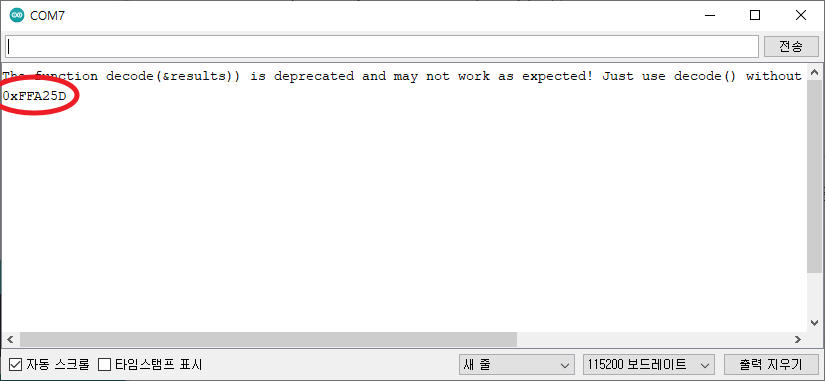
출력값 중에서 앞부분의 0x를 제외한 6자리의 값(아래 그림에서 FFA25D)이 방금 누른 버튼의 고유 값이다.
리모컨 고유값#
보유하고 있는 리모컨(XA5-14) 제품의 경우, 리모컨 타입은 NEC타입이며 각 버튼별 HEX값은 아래와 같다.
| Remote Button | unsigned int data |
|---|---|
| 1 | 0xFFA25D |
| 2 | 0XFF629D |
| 3 | 0XFFE21D |
| 4 | 0XFF22DD |
| 5 | 0XFF02FD |
| 6 | 0XFFC23D |
| 7 | 0XFFE01F |
| 8 | 0XFFA857 |
| 9 | 0XFF906F |
| 0 | 0XFF9867 |
| * | 0XFF6897 |
| # | 0XFFB04F |
| ▲ | 0XFF18E7 |
| ▼ | 0XFFA4B5 |
| ◀ | 0XFF10EF |
| ▶ | 0XFF5AA5 |
| OK | 0XFF38C7 |
리모컨 버튼값 시리얼모니터에 출력하기#
스케치에서 리모컨 버튼 정의하기#
각 버튼의 Code값을 알아냈으면 스케치에서 리모컨의 버튼을 정의한다. 예를 들어, 리모컨 버튼 중에서 “1"을 눌렀을 때, 출력되는 HEX값이 “0xFFA25D” 였다면,
#define BTN_1 0xFFA25D리모컨에 있는 모든 버튼을 위와 같은 방법으로 정의한다. 버튼이 보통 10~20개 정도 되므로 상당히 귀찮은 작업이지만 사용하려는 버튼은 모두 정의를 해야한다. 배열을 통해 정의할 수도 있다. 또한 별도의 리모컨이 없으면 집에서 사용하는 리모컨을 사용해도 된다.
sketch#
#include <IRremote.h>
#include <ir_Lego_PF_BitStreamEncoder.h>
#define BTN_CH_M 0xFF6897 // CH- Button
#define BTN_CH 0xFFB04F // CH Button
#define BTN_CH_P 0xFF18E7 // CH+ Button
#define BTN_PREV 0xFF4AB5 // PREV Button
#define BTN_NEXT 0xFF10EF // NEXT Button
#define BTN_PLAY_PAUSE 0xFF5AA5 // PLAY PAUSE Button
#define BTN_M 0xFF38C7 // - (VOL-) Button
#define BTN_P 0xFF38C8 // + (VOL+) Button
#define BTN_EQ 0xFF38C9 // EQ Button
#define BTN_100P 0xFF38CA // 100+ Button
#define BTN_200P 0xFF38CB // 100- Button
#define BTN_0 0xFF9867
#define BTN_1 0xFFA25D
#define BTN_2 0xFF629D
#define BTN_3 0xFFE21D
#define BTN_4 0xFF22DD
#define BTN_5 0xFF02FD
#define BTN_6 0xFFC23D
#define BTN_7 0xFFE01F
#define BTN_8 0xFFA857
#define BTN_9 0xFF906F
int recvPin = 2;
IRrecv irrecv(recvPin);
void setup() {
Serial.begin(9600);
irrecv.enableIRIn();
}
void loop() {
decode_results results;
if(irrecv.decode(&results)) {
switch(results.value) {
case BTN_CH_M :
Serial.println("CH-");
break;
case BTN_CH :
Serial.println("CH");
break;
case BTN_CH_P :
Serial.println("CH+");
break;
case BTN_PREV :
Serial.println("PREV");
break;
case BTN_NEXT :
Serial.println("NEXT");
break;
case BTN_PLAY_PAUSE :
Serial.println("PLAY/PAUSE");
break;
case BTN_M :
Serial.println("-");
break;
case BTN_P :
Serial.println("+");
break;
case BTN_EQ :
Serial.println("EQ");
break;
case BTN_100P :
Serial.println("100+");
break;
case BTN_200P :
Serial.println("200+");
break;
case BTN_0 :
Serial.println("0");
break;
case BTN_1 :
Serial.println("1");
break;
case BTN_2 :
Serial.println("2");
break;
case BTN_3 :
Serial.println("3");
break;
case BTN_4 :
Serial.println("4");
break;
case BTN_5 :
Serial.println("5");
break;
case BTN_6 :
Serial.println("6");
break;
case BTN_7 :
Serial.println("7");
break;
case BTN_8 :
Serial.println("8");
break;
case BTN_9 :
Serial.println("9");
break;
}
delay(500);
irrecv.resume();
}
}과제: 리모컨 계산기 만들기#
리모컨으로 서보모터 회전시키기#
3개의 리모컨 버튼을 정의하여 각 버튼을 통해 서버모터를 회전시켜 본다.
- 초기 위치 90도
- Left 버튼을 누르면 5도 감소
- Right 버튼을 누르면 5도 증가
- OK 버튼을 누르면 90도 위치로 이동
schematic#
sketch#
#include <Servo.h>
Servo servomotor;
int servomotorPin = 9;
int a = 90;
#include <IRremote.h>
#include <ir_Lego_PF_BitStreamEncoder.h>
#define BTN_1 0xFFA25D
#define BTN_2 0xFF629D
#define BTN_3 0xFFE21D
#define BTN_4 0xFF22DD
#define BTN_5 0xFF02FD
#define BTN_6 0xFFC23D
#define BTN_7 0xFFE01F
#define BTN_8 0xFFA857
#define BTN_9 0xFF906F
#define BTN_0 0xFF9867
#define BTN_A 0xFF6897 // * Asterisk Button
#define BTN_P 0xFFB04F // # Pound Button
#define BTN_U 0xFF18E7 // Up Button
#define BTN_D 0xFF4AB5 // Down Button
#define BTN_L 0xFF10EF // Left Button
#define BTN_R 0xFF5AA5 // Right Button
#define BTN_O 0xFF38C7 // OK Button
int recvPin = 2; // IR signal 핀
IRrecv irrecv(recvPin);
void setup() {
servomotor.attach(servomotorPin);
irrecv.enableIRIn();
}
void loop() {
decode_results results;
if(irrecv.decode(&results)) {
switch(results.value) {
case BTN_O : // OK버튼을 누르면 90도 위치로
a = 90;
break;
case BTN_L :
if(a > 5) {
a = a - 5; // L버튼을 누르면 서버모터 5도씩 감소
}
else
{
a = 0;
}
break;
case BTN_R :
if(a < 175) {
a = a + 5; // R버튼을 누르면 서버모터 5도씩 증가
}
else
{
a = 180;
}
break;
}
servomotor.write(a);
delay(500);
irrecv.resume();
}
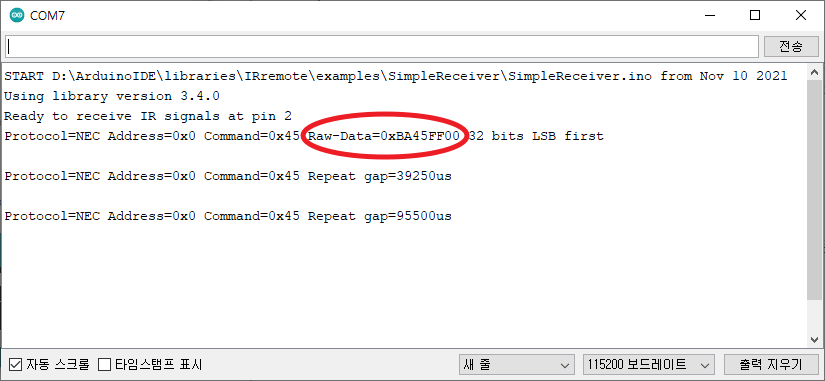
}LSB-first 32bit IR data code를 사용하려면#
LSB-first 형태의 디코더 데이터를 사용해야하는 경우에는 라이브러리에서 제공하는 설명서(IRremote: IRremote Arduino Library)를 우선 숙지하여 사용토록한다. 여기서는 간단한 사용방법만 덧붙인다.
- 예제> IRremote> SimpleReceiver를 선택하여 파일을 불러온다.
- SimpleReceiver.ino의 앞부분에, 사용하려는 리모컨의 프로토콜 타입을 선택할 수 있는 부분이 있다.
- 아두이노 실습용으로 판매되는 리모컨은 대부분 NEC타입이므로 변경할 필요가 없다.
- 삼성이나 LG 등 집에서 사용하는 리모컨의 HEX값을 알아내려면, 사용하려는 제품의 제조사에 따라 주석처리되는 부분을 적절히 수정한다.
//#define DECODE_DENON // Includes Sharp
//#define DECODE_JVC
//#define DECODE_KASEIKYO
//#define DECODE_PANASONIC // the same as DECODE_KASEIKYO
//#define DECODE_LG
#define DECODE_NEC // Includes Apple and Onkyo
//#define DECODE_SAMSUNG
//#define DECODE_SONY
//#define DECODE_RC5
//#define DECODE_RC6
//#define DECODE_BOSEWAVE
//#define DECODE_LEGO_PF
//#define DECODE_MAGIQUEST
//#define DECODE_WHYNTER
//#define DECODE_DISTANCE // universal decoder for pulse width or pulse distance protocols
//#define DECODE_HASH // special decoder for all protocols
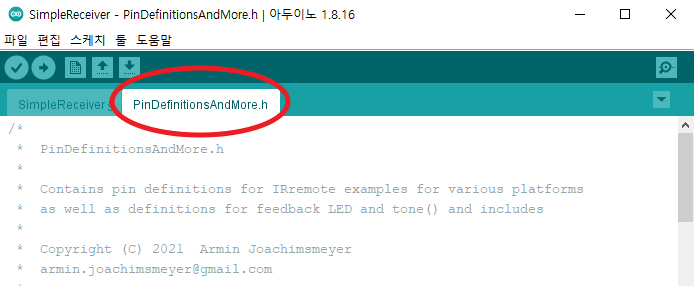
- SimpleReceiver을 열면 PinDefinitionsAndMore.h가 동시에 열린다.
- 이 파일은 사용하는 보드에 따라 Signal핀을 연결하는 핀 번호를 정의하고 있다.
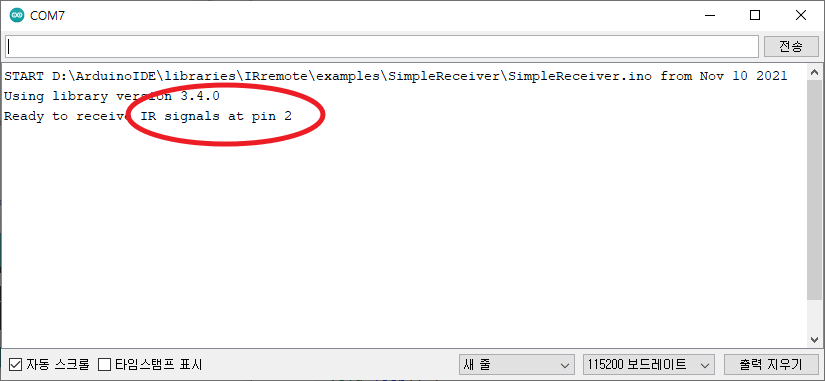
- 아두이노 UNO의 경우 DEFAULT/AVR 플랫폼으로 정의되어 있으므로 IR Input핀은 2번을 사용한다. (아래 3번과정 참고: 시리얼 모니터를 열면, 연결된 보드에 따라 몇번 핀에 연결해야하는지 출력이 되므로, 이 과정에서 Signal을 어디에 연결해야하는지 확인할 필요는 없다.)
- ESP32의 경우 IR Input이 GPIO 15번으로 지정되어 있다.
- 스케치를 업로드 한 후, 시리얼 모니터를 열고 Baud rate를 115200으로 설정한다. (Signal이 연결된 핀의 번호가 맞는지 확인)
- 리모컨의 버튼을 IR수신부를 향하여 누르면, 3줄이 출력됨
- 첫번째 라인에 출력되는 Raw-Data 부분에서 앞부분의 0x를 제외한 8자리의 값(아래 그림에서 BA45FF00)이 방금 누른 버튼의 고유 값이다.
- 각 버튼을 차례대로 누르면서 버튼의 고유값을 기록한다. 다운로드