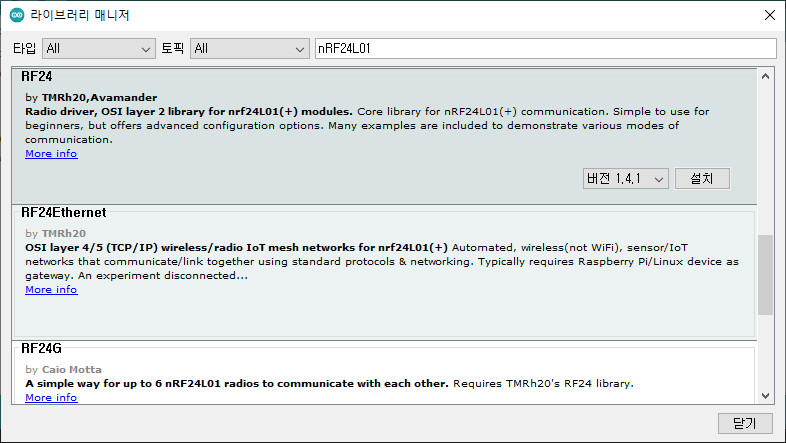
nRF24L01#
library#
스케치> 라이브러리 포함하기> 라이브러리 관리> nRF24L01 검색한 후, RF24 by TMRh20, Avamander 설치
schematic: nRF24L01 receiver with ESP32#
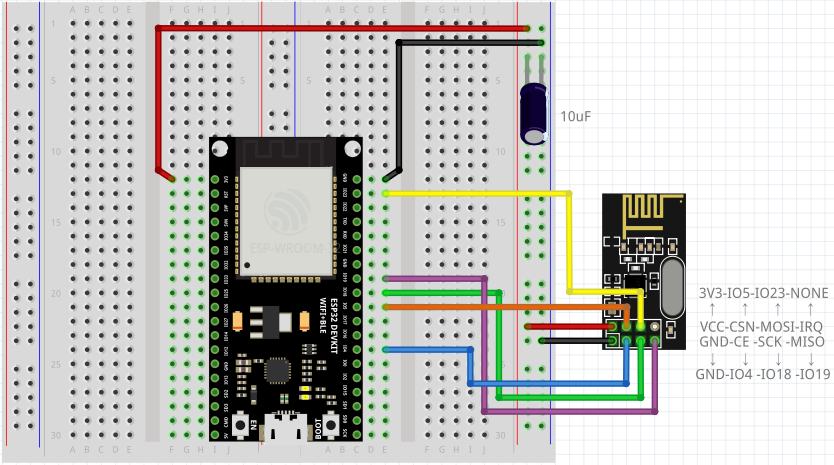
※ nRF24L01 모듈에 따라 10uF 캐페시터가 없으면 통신이 안되는 경우가 있음. 이런 경우에만 사용할 것.
pinmap: (안테나를 위로 향하게 두고, 모듈을 위에서 내려다 볼때의 핀배열)#
| ESP32 | 3V3 | IO5 | IO23 | None |
|---|---|---|---|---|
| ↑ | ↑ | ↑ | ↑ | |
| nRF24L01 | VCC + 10uF | CSN | MOSI | IRQ |
| (위에서 보이는 핀배열) | GND + 10uF | CE | SCK | MISO |
| ↓ | ↓ | ↓ | ↓ | |
| ESP32 | GND | IO4 | IO18 | IO19 |
sketch: 1:1 Chat Room#
- 양방향 송수신을 위하여 위 회로도를 보고 2개의 모듈을 만든 뒤, 다음 스케치를 업로드한다.
- 시리얼 모니터를 띄운 뒤, 메세지를 전송해본다.
//Libraries for NRF24L01+ module.
#include <SPI.h>
#include <nRF24L01.h>
#include <RF24.h>
//RF24 object with two pins defined with arguments. CE: 4, CSN: 5
RF24 radio(4, 5);
//Address of the pipe. 40 bit long, you can choose this freely.
//Remember to use different address in different projects.
long long address = 0x1234ABCDEFLL;
int count = 0;
char stext[32] = "";
int spos = 0;
char rtext[32] = "";
int rpos = 0;
void sendText(char * text, int tlen)
{
radio.stopListening();
radio.openWritingPipe(address);
radio.write(stext, tlen);
Serial.print("SEND: ");
Serial.println(text);
memset(stext, 0x00, 32);
radio.openReadingPipe(0, address);
radio.startListening();
}
void setup() {
//Start the radio
Serial.begin(115200);
radio.begin();
//Open reading pipe with given address and start listening for incoming data
radio.openReadingPipe(0, address);
radio.setPALevel(RF24_PA_MIN);
radio.startListening();
}
void loop() {
while(0 < Serial.available()) {
stext[spos] = Serial.read();
if(stext[spos] == 0x0a) {
sendText(stext, spos);
spos = 0;
}
else {
spos += 1;
}
}
if (radio.available()) {
while (radio.available()) {
radio.read(rtext, 32);
}
Serial.print("RECV: ");
Serial.println(rtext);
}
}sketch: 1:1 Chat Room#
다음은 처음 실행 후 시리얼모니터에 입력한 ID를 이용하여 Chat Room을 만드는 코드이다.
//Libraries for NRF24L01+ module.
#include <SPI.h>
#include <nRF24L01.h>
#include <RF24.h>
//RF24 object with two pins defined with arguments. CE: 4, CSN: 5
RF24 radio(4, 5);
//Address of the pipe. 40 bit long, you can choose this freely.
//Remember to use different address in different projects.
long long address = 0x1234ABCDEFLL;
String username = "";
String dataInput;
char dataToSend[32];
char dataReceived[32];
void setup() {
//Start the radio
Serial.begin(115200);
delay(2000);
Serial.println("Enter username: ");
radio.begin();
radio.setRetries(3, 5);
//Open reading pipe with given address and start listening for incoming data
radio.openWritingPipe(address);
radio.openReadingPipe(0, address);
radio.setPALevel(RF24_PA_MIN);
}
void loop() {
//set username
while(username == "") {
if(Serial.available()) {
username = Serial.readStringUntil('\n');
Serial.print("Welcome ");
Serial.println(username);
}
}
radio.startListening();
if(radio.available()) {
radio.read(&dataReceived, sizeof(dataReceived));
Serial.println(dataReceived);
}
if(Serial.available()) {
radio.stopListening();
dataInput = "[" + username + "] " + Serial.readStringUntil('\n');
Serial.println(dataInput);
dataInput.toCharArray(dataToSend, 32);
radio.write(&dataToSend, sizeof(dataToSend));
}
}nRF24L01을 이용한 센서값 전송#
for Receiver#
schematic#
sketch#
long long address = 0x1234ABCDEFLL;#
- receiver와 transmitter의 페어링을 위한 파이프(주소)를 지정함. (receiver와 transmitter의 파이프(주소)는 동일해야 함)
- 주변 여러 사람이 동시에 nRF24L01 모듈을 사용할 경우, 서로 다른 고유의 파이프(주소)를 지정하여야 한다.
uint16_t temphumi[2];#
8-bit 기반 Arduino와 32-bit 기반 ESP32를 receiver와 transmitter로 혼용하여 사용할 경우, 아래와 같이 int를 사용하여 변수(혹은 배열)를 선언하면 문제가 발생함.
int temphumi[2];8비트 아키텍처에서 int는 16비트이지만, 32비트 아키텍처에서는 32비트로 정의되기 때문이며,
이로 인해 radio.write 또는 radio.read를 할때 일부 데이터가 송신(혹은 수신)되지 않을 수 있다.
그러므로, arduino와 ESP32를 함께 사용할때에는, 아래와 같은 형태로 변수(혹은 배열) 선언시 특정 비트의 변수로 제한하여 선언할 필요가 있다.
uint16_t temphumi[2];단, 송수신기로 Arduino만 사용하거나, 혹은 ESP32만 사용하는 경우에는 int를 사용해도 됨
radio.openReadingPipe(1, address);#
페어링 파이프(주소)를 오픈
for Transmitter#
schematic#
스케치를 업로드하고, 컴퓨터와 연결한 USB선을 분리한 뒤, 독립하여 동작하도록 외부 전원을 연결한다.
※ nRF24L01 모듈에 따라 10uF 캐페시터가 없으면 통신이 안되는 경우가 있음. 이런 경우에만 사용할 것.
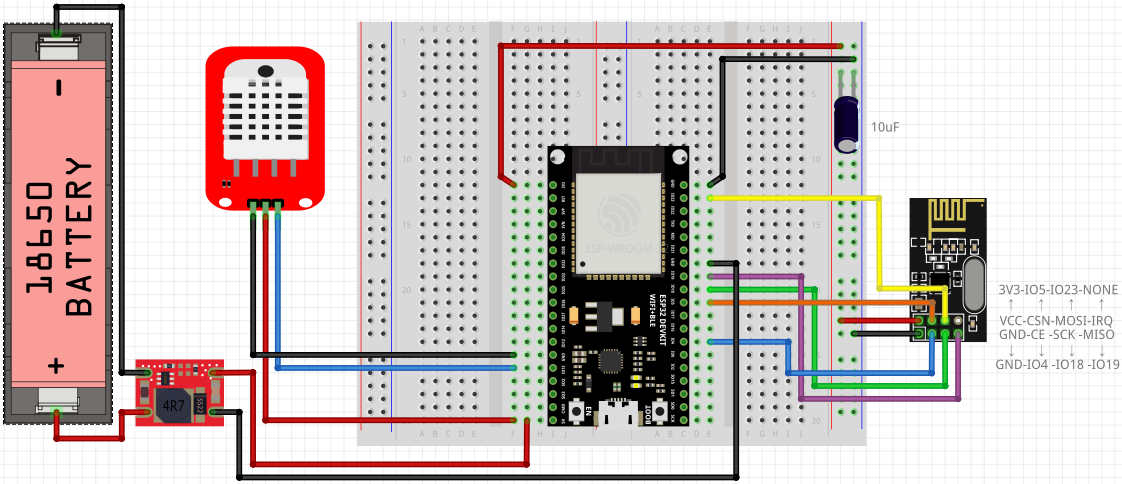
18650을 사용하여 5V 외부 전원 만들기#
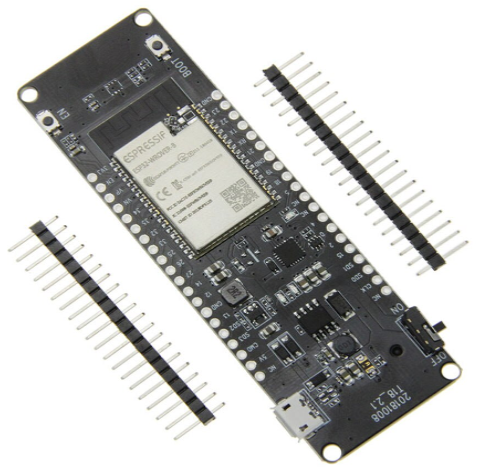
- ESP32를 외부전원을 통해 동작시키려면, ESP32의 5V/GND 단자를 사용하여 5
12V의 전압(최적 전압은 67V)을 공급하여야 한다. - 18650 소켓에 F단자를 납땜하여 연결한다. (M단자는 서로 맞닿을 경우 과열 위험이 있으므로 사용금지!)

- DC-DC 5V 승압 모듈에 아래 그림과 같이 납땜하여 연결한다. (USB단자는 사용하지 않음)
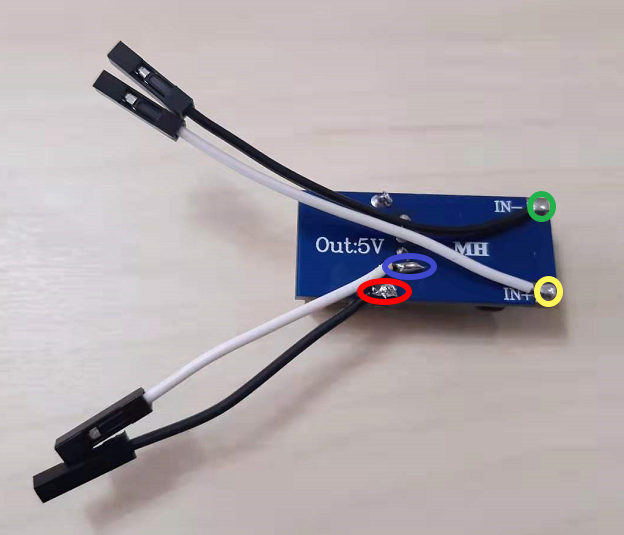
※ USB단자가 있는 5V 승압 모듈을 사용하였지만, USB단자가 없는 승압모듈을 사용하면 더 깔끔하게 제작 가능하다.

- 위 사진과 같이 납땜한 승압 모듈을 18650배터리와 ESP32에 연결한다.
| 승압 모듈 | ESP32 | 18650배터리 |
|---|---|---|
| 파란색 원 (GND) | GND | |
| 빨간색 원 (5V) | 5V | |
| 노란색 원(IN+) | (+)극 | |
| 초록색 원(IN-) | (-)극 |
(transmitter의 경우, 많은 전류를 사용하지 않으므로) 위 그림처럼 ESP32에 DC컨버터를 사용하여 전원을 공급하는 형태보다는, TTGO T-Energy 사용을 추천함
| TTGO T-Energy | |
|---|---|
 | 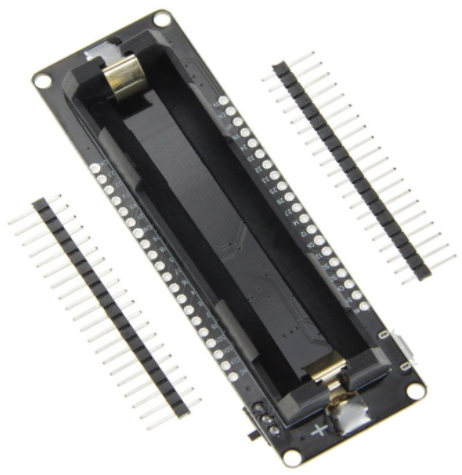 |
sketch: DHT22 temperature and humidity Sensor#
library for DHT11 or DHT22 sensor#
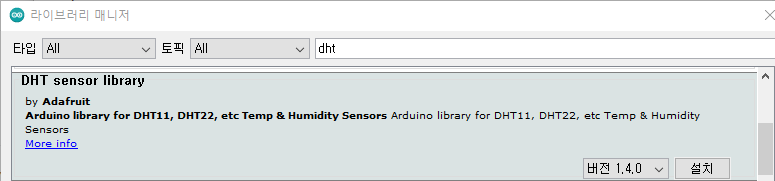
먼저 온습도 센서 데이터를 보내기 위해 온습도 센서 라이브러리를 설치
스케치> 라이브러리 포함하기> 라이브러리 관리> DHT 검색
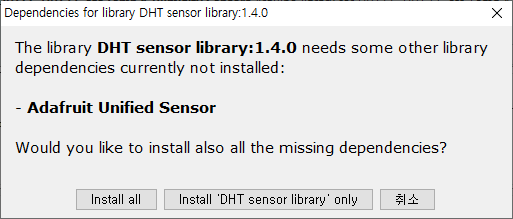
먼저 **DHT sensor library (by Adafruit)**를 검색하여 설치를 누르면,
Dependencies for library DHT sensor library 창이 나오면 Install all을 클릭하여 2개의 라이브러리를 동시에 설치
//Libraries for NRF24L01+ module.
#include <SPI.h>
#include <RF24.h>
//RF24 object with two pins defined with arguments. CE: 4, CSN: 5
RF24 radio(4, 5);
//Address of the pipe. 40 bit long, you can choose this freely.
//Remember to use different address in different projects.
long long address = 0x1234ABCDEFLL;
// for temperature, humidity sensor
#include "DHT.h"
#define DHTPIN 13 // data pin
#define DHTTYPE DHT22 // change to DHT11 if you're using the DHT11
//float temphumi[2]; // AM2301(DHT21) -> DHT21, AM2302(DHT22) -> DHT22
uint16_t temphumi[2];
DHT dht(DHTPIN, DHTTYPE);
void setup() {
//Start the radio
Serial.begin(115200);
radio.begin();
radio.openWritingPipe(address);
//RF24_PA_MIN, RF24_PA_LOW, RF24_PA_HIGH and RF24_PA_MAX
//NRF24L01: -18dBm, -12dBm,-6dBM, and 0dBm
radio.setPALevel(RF24_PA_LOW);
radio.stopListening();
dht.begin();
}
void loop() {
//Get temperature from the sensor
uint16_t t = dht.readTemperature();
uint16_t h = dht.readHumidity();
temphumi[0] = t;
temphumi[1] = h;
//Send the temperature wirelessly, print error if failed
if (!radio.write(&temphumi, sizeof(temphumi))) {
Serial.println(F("Sending temperature failed"));
// Check if any reads failed and exit early (to try again).
if (isnan(h) || isnan(t)) {
Serial.println(F("Failed to read from DHT sensor!"));
return;
}
delay(2000);
}
}long long address = 0x1234ABCDEFLL;
receiver와 transmitter의 페어링을 위한 파이프(주소)를 지정함. (receiver와 transmitter의 파이프(주소)는 동일해야 함)
주변 여러 사람이 동시에 nRF24L01 모듈을 사용할 경우, 서로 다른 고유의 파이프(주소)를 지정하여야 한다.
- radio.setPALevel(RF24_PA_LOW);
- RF24_PA_MIN
- RF24_PA_LOW
- RF24_PA_HIGH
- RF24_PA_MAX: 가장 강함 (전류소모도 큼)
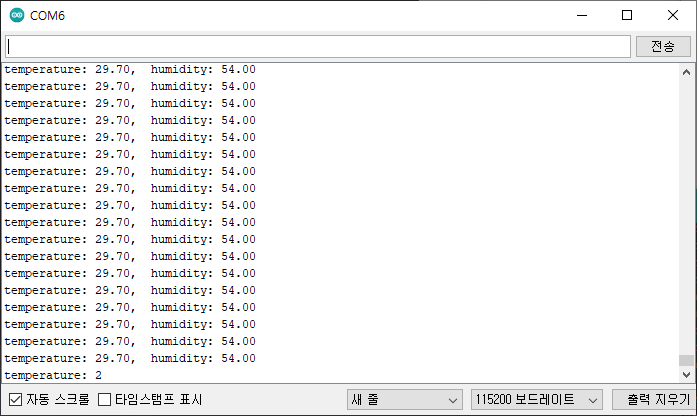
result#
nRF24L01 + Dual Joystick#
2개의 조이스틱을 사용하여 x축, y축 좌표값을 받아보자.
for Transmitter#
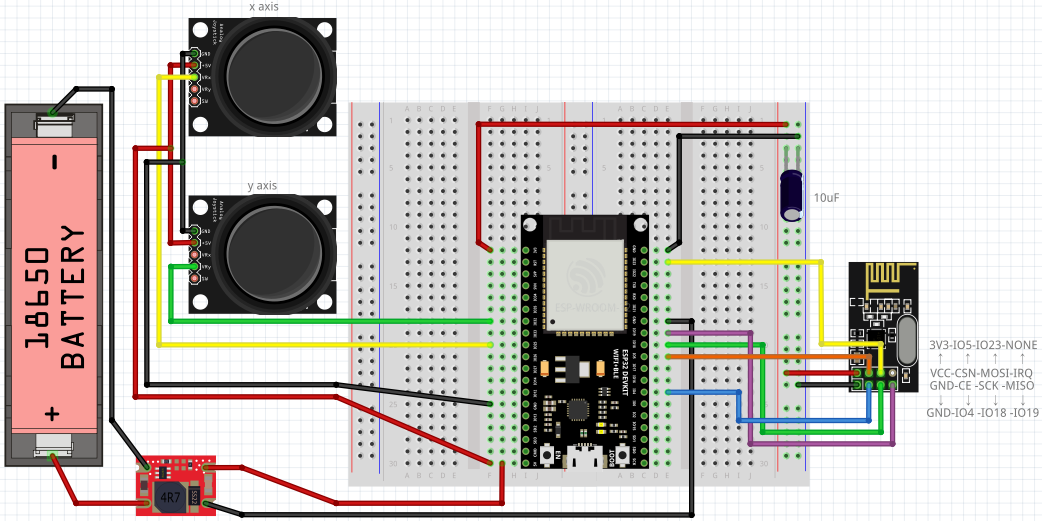
schematic: nRF24L01 transmitter with ESP32, Dual Joystick#
하나의 조이스틱으로도 일반적인 조정이 가능하지만, 시판되는 조정기의 경우 dual joystick(혹은 dual channel)을 사용하는 형태가 많으므로, 여기서도 이와 같은 형태의 transmitter를 만들어 보자.
위 그림에서는 18650을 DC 컨버터를 사용하여 5V핀에 입력하고 있음.
(transmitter의 경우, 많은 전류를 사용하지 않으므로) 위 그림처럼 ESP32에 DC컨버터를 사용하여 전원을 공급하는 형태보다는, TTGO T-Energy 사용을 추천함
TTGO T-Energy
pinmap#
| ESP32 | Joystick1 (x축) | Joystick2 (y축) |
|---|---|---|
| GND | GND | GND |
| 5V | 5V | 5V |
| 25 | VRX | |
| 32 | VRY |
sketch: nRF24L01 transmitter with ESP32, Dual Joystick#
#include <SPI.h>
#include <RF24.h>
RF24 radio(4, 5);
long long address = 0x1234ABCDEFLL;
// for no interference, two joysticks must be used with each other ADC!
// one joystick use ADC1: GPIO 36,39,32,33,34,35
// the other must use ADC2: GPIO 4,0,2,15,13,12,14,27,25,26
const int Jstick_x_pin = 25; // Left_Right GPIO25
const int Jstick_y_pin = 32; // Forward_Back GPIO32
struct Value{
uint16_t value_x;
uint16_t value_y;
};
Value data;
void setup() {
Serial.begin(115200);
radio.begin();
radio.openWritingPipe(address);
radio.setPALevel(RF24_PA_MIN);
radio.stopListening();
}
void loop() {
data.value_x = Jstick(Jstick_x_pin);
delay(10);
data.value_y = Jstick(Jstick_y_pin);
delay(10);
radio.write(&data, sizeof(Value));
//Serial.print("x: "); Serial.print(data.value_x);
//Serial.print(", y: "); Serial.println(data.value_y);
}
uint16_t Jstick(int Jstick_Pin){
return analogRead(Jstick_Pin);
}Joystick GPIO의 선정#
// for no interference, two joysticks must be used with each other ADC!
// one joystick use ADC1: GPIO 36,39,32,33,34,35
// the other must use ADC2: GPIO 4,0,2,15,13,12,14,27,25,26
const int Jstick_x_pin = 25; // Left_Right GPIO25
const int Jstick_y_pin = 32; // Forward_Back GPIO32
- 2개의 joystick을 동시에 사용할때 동일한 ADC의 GPIO를 사용하면, 한쪽 joystick을 움직여 값을 변화시킬 경우 다른 한쪽 joystick을 움직이지 않았음에도 동시에 값이 일부 (소폭) 변화하는 현상이 생긴다.
- 이 문제를 해결하기 위해 각각의 joystick을 서로 다른 ADC에 연결한다.
- ADC1: GPIO 36,39,32,33,34,35 중 1개 사용 (예제에서는 GPIO 32를 y축 joystick으로 사용)
- ADC2: GPIO 4,(0),(2),15,13,(12),14,27,25,26 중 1개 사용 (()안의 핀은 사용시 주의 필요) (예제에서는 GPIO 25를 x축 joystick으로 사용)
- 단, ESP32의 wifi 기능을 이용하면 ADC1핀 중에서 wifi 기능에 공유되는 핀의 사용에 제한을 받게 되므로 주의가 필요하다.
- 그밖에도 사용하는 ADC의 noise를 제거하기 위해 다음과 같은 방법을 쓰는 것이 좋다.
- GPIO와 GND에 100nF 케패시터를 연결하여 사용
- 10여회 정도의 값을 받아 평균값으로 사용
for Receiver#
schematic: nRF24L01 receiver with ESP32#
sketch#
#include <SPI.h>
#include <RF24.h>
RF24 radio(4 ,5);
long long address = 0x1234ABCDEFLL;
struct Value{
uint16_t value_x;
uint16_t value_y;
};
Value data;
void setup() {
Serial.begin(115200);
radio.begin();
radio.openReadingPipe(1, address);
radio.setPALevel(RF24_PA_LOW);
radio.startListening();
}
unsigned long lastRecvTime = 0;
void recvData(){
while( radio.available()){
radio.read(&data, sizeof(Value));
lastRecvTime = millis();
}
}
void loop() {
unsigned long now = millis();
if( now - lastRecvTime > 1000){
recvData();
}
Serial.print("x: "); Serial.print(data.value_x);
Serial.print(", y: "); Serial.println(data.value_y);
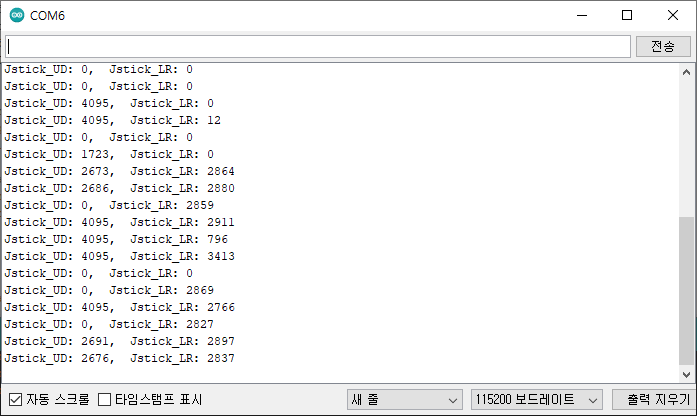
}result#
nRF24L01 + Dual Joystick + Dual Servomotors#
for Receiver#
schematic: nRF24L01 receiver with ESP32, Dual Joystick#
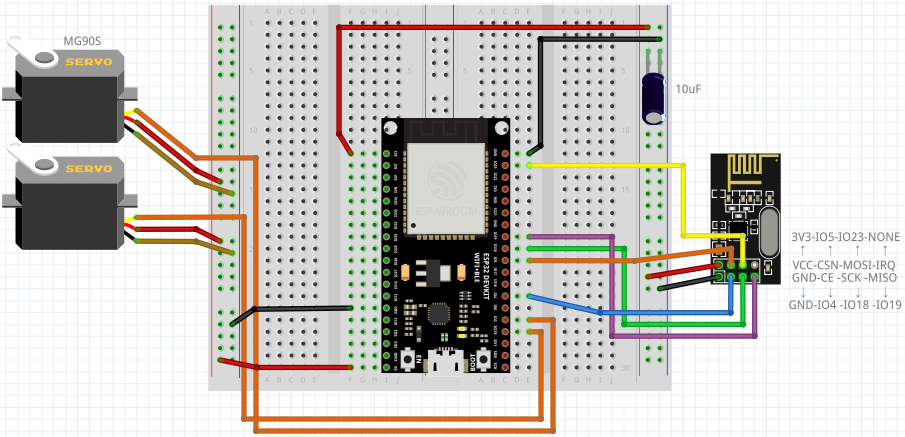
- MG996R과 같이 전류 사용량이 큰 서보 모터를 2개 이상 사용하는 경우, ESP32의 5V pin에서 공급하는 전류량이 부족하여 서보모터 동작이 원활치 않을 수 있다. 이런 경우에는 아래와 같이 외부 전원을 사용하여야 한다.
pinmap#
| ESP32 | servo_x | servo_y |
|---|---|---|
| GND | GND (갈) | GND (갈) |
| 5V | 5V (빨) | 5V (빨) |
| 25 | VRX (주) | |
| 32 | VRY (주) |
schematic: nRF24L01 receiver with ESP32, Dual Joystick, External Power (standalone)#
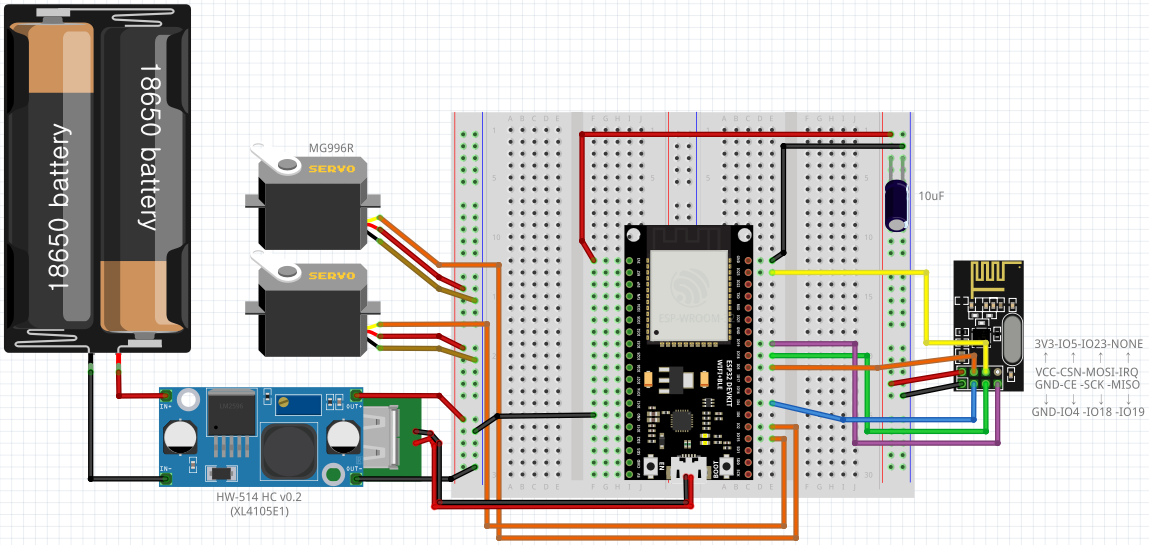
외부 전원의 구성#
18650 리튬이온 전지 2개를 사용하여 7.4V를 공급 (혹은 18650 3개를 사용하여 11.1V로 구성)
XL4015E1칩을 사용한 HW-514 DC-DC regulator를 사용하여, 7.4V → 5V로 전압을 낮춘다. (유사한 형태의 모듈 사용 가능)
HW-514 HC v0.2 Specification 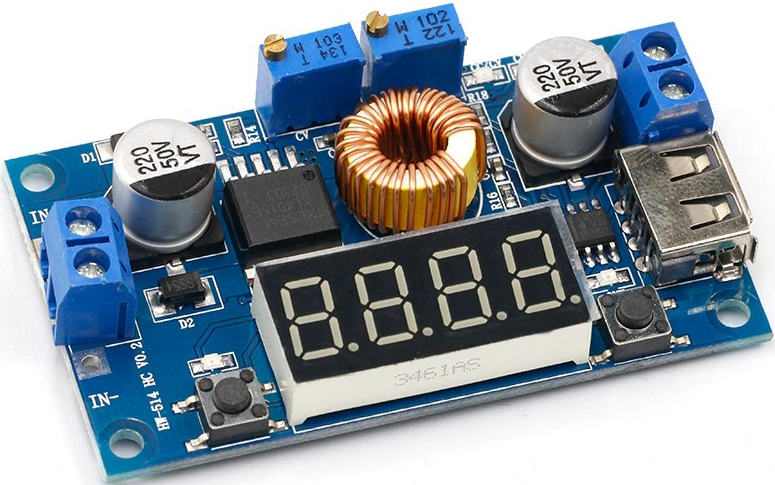
Input voltage: 5-36V (6.5V 미만 입력시 디스플레이 동작안됨)
Output voltage: 1.25-32V continuously adjustable
Output current: adjustable, up to 5A (4.5A 이내 권장)
Output power: 75W max (50W 이내 권장)
Conversion efficiency: up to 96%
Working frequency: 180KHz
Short circuit protection: yes
Over-temperature protection
Input reverse polarity protection: None,
(필요시 고전류 다이오드를 입력단에 사용)
Module Size: 68.2 * 38.8 * 15 (mm)왼쪽 가변저항으로 출력 전압을 5V 조정 (오른쪽 가변저항은 출력 전류를 조정)
2P 출력단자는 모터에 직접 연결
USB포트는 USB-A to microUSB 케이블을 사용하여 ESP32에 연결 (이런 이유로 USB단자가 있는 모듈을 사용하는 것이 편함)
아래와 같은 mini360, mini560 등의 소형 컨버터를 사용하면,
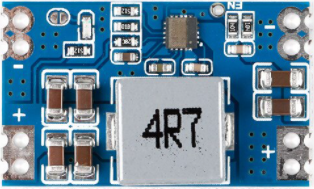
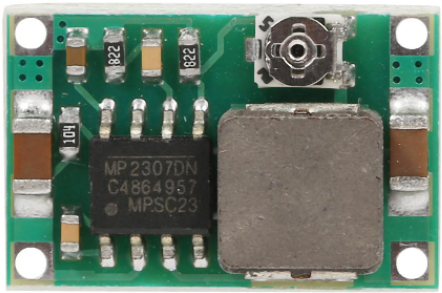
- SG90 서보모터는 정상적으로 동작
- MG996R 서보모터를 연결한 경우에는 컨버터 자체가 불안정하여 모터 동작이 멈춤
※ 외부 전원 구성시 주의할 점!#
- 외부 전원을 ESP32의 5V or 3.3V 핀에 직접 연결하지 않도록 한다.
- 외부 전원을 DC 컨버터를 사용하여 5V or 3.3V로 만든 경우에도 5V or 3.3V 핀에 직접 연결하면 안된다.
- ESP32의 스펙상 5V or 3.3V 핀을 사용하여 외부 전원을 구성해도 된다고 나와 있지만, 실제로는 모터 등의 모듈이 작동하지 않거나, 심할 경우 ESP32 보드가 망가질 수 있으므로 이와 같은 구성은 지양한다.
- (경험상) ESP32의 microUSB포트를 통해 전원을 공급하는 것이 가장 안정적으로 동작하였음!
sketch: nRF24L01 receiver with ESP32, Dual Joystick , External Power (standalone)#
library for ESP32#
스케치> 라이브러리 포함하기> 라이브러리 관리 에서 “esp32servo” 검색
sketch#
#include <SPI.h>
#include <RF24.h>
RF24 radio(4, 5);
long long address = 0x1234ABCDEFLL;
struct Value{
uint16_t value_x;
uint16_t value_y;
};
Value data;
//Servo motor library for ESP32
#include <ESP32Servo.h>
Servo servo_x; // create servo object to control a servo
Servo servo_y; // 16 servo objects can be created on the ESP32
int angle_x, angle_y;
// Recommended PWM GPIO pins on the ESP32 include 2,4,12-19,21-23,25-27,32-33
int servo_xPin = 15;
int servo_yPin = 2;
// RecvTime
unsigned long lastRecvTime = 0;
void recvData(){
while( radio.available()){
radio.read(&data, sizeof(Value));
lastRecvTime = millis();
}
}
void setup() {
Serial.begin(115200);
radio.begin();
radio.openReadingPipe(1, address);
radio.setPALevel(RF24_PA_LOW);
radio.startListening();
// Allow allocation of all timers
ESP32PWM::allocateTimer(0);
ESP32PWM::allocateTimer(1);
ESP32PWM::allocateTimer(2);
ESP32PWM::allocateTimer(3);
servo_x.setPeriodHertz(50); // standard 50 hz servo
servo_y.setPeriodHertz(50);
servo_x.attach(servo_xPin, 500, 2500); // attaches the servo on pin 25 & 32 to the servo object
servo_y.attach(servo_yPin, 500, 2500);
// using default min/max of 1000us and 2000us
// different servos may require different min/max settings
// for an accurate 0 to 180 sweep
}
void loop() {
recvData();
unsigned long now = millis();
if( now - lastRecvTime > 1000){
//ResetData();
}
rotate_xy();
}
void rotate_xy() {
Serial.print("x: "); Serial.print(data.value_x);
Serial.print(", y: "); Serial.println(data.value_y);
angle_x = map(data.value_x, 0, 4095, 0, 180);
angle_y = map(data.value_y, 0, 4095, 0, 180);
servo_x.write(angle_x);
servo_y.write(angle_y);
delay(10);
}조이스틱 중립 조정#
2개의 조이스틱을 중립에 두고, 시리얼 모니터를 통해 센서값을 확인했을때, x축 서보모터는 2700정도, y축 서보모터는 2800 정도의 값을 나타내었다.
이를 기준으로 조이스틱의 값에 따른 대략적인 형태를 생각해보면 (아래의 원 그림에 2개의 조이스틱 값을 모두 나타냄)
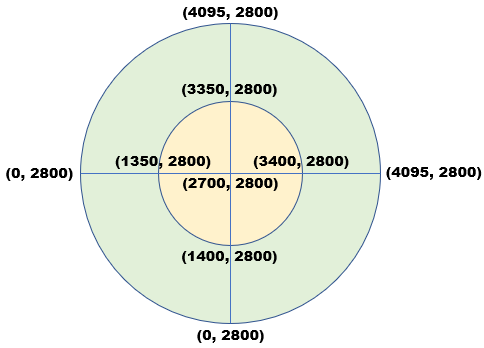
x축 조이스틱 값이
- 1350~3400 일때: 중립 (서보모터는 90도 위치로 이동)
- 0~1350 일때: 서보모터 1도씩 감소 (0도 위치가 될때까지)
- 단, 자동차 조향 시스템에 적용할 경우 55~90도 사이에서만 움직이도록 조정
- 3400~4095 일때: 서보모터 1도씩 증가 (180도 위치가 될때까지)
- 단, 자동차 조향 시스템에 적용할 경우 90~125도 사이에서만 움직이도록 조정
y축 조이스틱 값이
- 1400~3350 일때: 중립 (서보모터는 90도 위치로 이동)
- 0~1400 일때: 서보모터 1도씩 감소 (0도 위치가 될때까지) (자동차에 적용시 브레이크 역할)
- 3350~4095 일때: 서보모터 1도씩 증가 (180도 위치가 될때까지) (자동차에 적용시 액셀레이터 역할)
위 그림에 나타낸 값은 모든 조이스틱에 적용되는 절대적인 값이 아니며, 조이스틱마다 중립을 나타내는 센서값이 다르므로, 초기값을 100번 읽은 후 평균값을 만들어 사용한다.
sketch#
#include <SPI.h>
#include <RF24.h>
RF24 radio(4 ,5);
long long address = 0x1234ABCDEFLL;
struct Value{
uint16_t value_x;
uint16_t value_y;
};
Value data;
//Servo motor library for ESP32
#include <ESP32Servo.h>
Servo servo_x; // create servo object to control a servo
Servo servo_y; // 16 servo objects can be created on the ESP32
int angle_x = 90;
int angle_y = 90;
int i = 0;
int center_x = 0;
int center_y = 0;
int ref_xl, ref_xr, ref_ya, ref_yb; // Servo rotation reference value
// for no interference, each joysticks must be used with other ADC! (* not recommended)
// one joystick use ADC1: GPIO 36,39,32,33,34,35
// the other must use ADC2: GPIO 4,0*,2,15,13,12,14,27,25,26
int servo_xPin = 15;
int servo_yPin = 2;
// RecvTime
unsigned long lastRecvTime = 0;
void centerData(){
while(i < 100) {
if(radio.available()){
radio.read(&data, sizeof(Value));
center_x = center_x + data.value_x;
center_y = center_y + data.value_y;
i++;
}
}
center_x = center_x / 100; // x축 조이스틱 센터값
center_y = center_y / 100; // y축 조이스틱 센터값
ref_xl = center_x / 2; // 좌회전 동작 기준값
ref_xr = (4095 + center_x) / 2; // 우회전 동작 기준값
ref_ya = (4095 + center_y) / 2; // accelator 동작 기준값
ref_yb = center_y / 2; // brake 동작 기준값
}
void recvData(){
while(radio.available()){
radio.read(&data, sizeof(Value));
lastRecvTime = millis();
}
}
void setup() {
Serial.begin(115200);
radio.begin();
radio.openReadingPipe(1, address);
radio.setPALevel(RF24_PA_LOW);
radio.startListening();
// Allow allocation of all timers
ESP32PWM::allocateTimer(0);
ESP32PWM::allocateTimer(1);
ESP32PWM::allocateTimer(2);
ESP32PWM::allocateTimer(3);
servo_x.setPeriodHertz(50); // standard 50 hz servo
servo_y.setPeriodHertz(50);
servo_x.attach(servo_xPin, 500, 2500); // attaches the servo on pin 25 & 32 to the servo object
servo_y.attach(servo_yPin, 500, 2500);
// using default min/max of 1000us and 2000us
// different servos may require different min/max settings
// for an accurate 0 to 180 sweep
// center value
centerData();
}
void loop() {
unsigned long now = millis();
if( now - lastRecvTime > 5){ // 5ms 마다 서보출력
recvData();
rotate_xy();
}
}
void rotate_xy() {
//Serial.print("x: "); Serial.print(data.value_x);
//Serial.print(", y: "); Serial.println(data.value_y);
//x축 서보 구동 조건 설정
if(data.value_x < ref_xl) {
if(angle_x > 0) {
angle_x--;
}
else {
angle_x = 0;
}
}
else if(data.value_x > ref_xr) {
if(angle_x < 180) {
angle_x++;
}
else {
angle_x = 180;
}
}
else {
if(angle_x < 90) {
angle_x++;
}
else if(angle_x > 90) {
angle_x--;
}
else {
angle_x = 90;
}
}
//y축 서보 구동 조건 설정
if(data.value_y < ref_yb) {
if(angle_y > 0) {
angle_y--;
}
else {
angle_y = 0;
}
}
else if(data.value_y > ref_ya) {
if(angle_y < 180) {
angle_y++;
}
else {
angle_y = 180;
}
}
else {
if(angle_y < 90) {
angle_y++;
}
else if(angle_y > 90) {
angle_y--;
}
else {
angle_y = 90;
}
}
servo_x.write(angle_x);
servo_y.write(angle_y);
delay(5); // delay를 더 줄이면 서보 모터 기어에 무리가 감
}