Solar Tracker 만들기#
팬(도리도리) & 틸트(끄덕끄덕)가 가능한 2축 서보모터 거치대와 2개의 서보모터를 사용하여 Solar Tracker를 만들어 보자.
단계1: Solar Tracker Frame 3D Printing#
3D 프린팅 후, 조도센서를 설치할 4곳에 1mm 드릴을 이용하여 각각 2개씩 구멍을 뚫는다 (총 8개).
단계2: 조도센서 조립하기#
조도센서 삽입#
조도센서의 다리를 위에서 뚫은 구멍을 통해 넣은 뒤,
뒤쪽에 글루건을 쏘아 고정시킨다. (조도센서는 극성을 구분할 필요가 없으므로, 서로 선이 맞닿지만 않으면 된다.)
4개의 조도 센서를 위와 같은 방식으로 고정한다.
10kΩ 저항 연결#
아래 그림과 같이 연결한다.
- 각 조도센서에 연결된 2개의 선 중 하나를 골라 10k 저항을 연결하고 한 뒤, 저항의 다른 쪽 끝을 모두 맞붙여서 GND에 연결한다.
- 조도센서의 다른 한쪽 끝을 모두 맞붙여서 ESP32의 3.3V에 연결한다.
GND와 3.3로 연결되는 선들이 서로 붙지 않도록 절연테이프를 붙여준다.
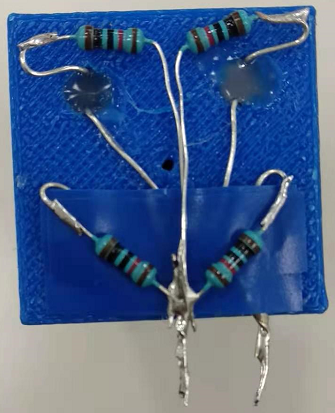
각 조도센서와 10k 저항의 사이에 ESP32에 연결할 GPIO선을 하나씩 납땜하여 연결한다.
ESP32의 3.3V와 GND에 연결할 선도 함께 납땜하여 연결한다.

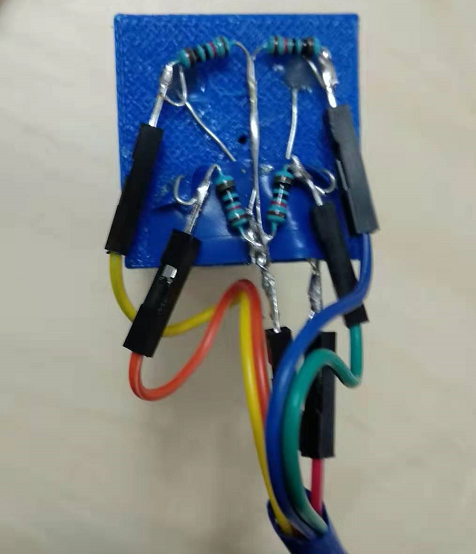
선 모양을 잡아 정리한다. (위 사진에는 하트 모양처럼 양 옆으로 선이 나와 있지만, 추후 거치대 장착을 위해서는 아래 사진처럼 모두 오무려주어야 한다.)
단계3: 2축 서보모터 거치대에 장착하기#
schematic#
sketch#
/************ ESP32 SKETCH FOR SOLAR TRACKER ***************************************
Author: K. Jun, Lee
Blog: https://stemwith.github.io 2020-12-04
// Use 3.3V for LDR sensor VCC
// Edit your sensor sensitivity: tolh, tolv
// Edit your sensor GPIO pin: ldr_lt, ldr_rt, ldr_ld, ldr_rd
// Edit initial sensor calibration value: avlt_cali, avrt_cali, avld_cali, avrd_cali
***********************************************************************************/
// for horizontal Servo PWM properties
const int ledPin_hori = 19; // corresponds to GPIO 19
const int ledChannel_hori = 1;
const int freq_hori = 50;
const int resolution_hori = 16;
// for vertical Servo PWM properties
const int ledPin_vert = 18; // corresponds to GPIO 18
const int ledChannel_vert = 0;
const int freq_vert = 50;
const int resolution_vert = 16;
int deg_hori = 90; // default horizon
int deg_vert = 45; // default vertical
int duty;
// LDR sensor pin
int ldr_lt = 32; // Left_Top LDR pin
int ldr_rt = 33; // Right_Top LDR pin
int ldr_ld = 34; // Left_Down LDR pin
int ldr_rd = 35; // Right_Down LDR pin
// LDR sensor value
int lt[10];
int rt[10];
int ld[10];
int rd[10];
// Sensitivity (tolerance)
int tolh = 150; // horizon tolerance
int tolv = 150; // vertical tolerance
// initial sensor correction value
int avlt_cali = 0; // 초기값 보정
int avrt_cali = 350; // (센서에 밝은 빛을 직접 가하여 최대값을 측정한 뒤 편차를 사용)
int avld_cali = 330;
int avrd_cali = 430;
void setup() {
Serial.begin(115200);
// Servo PWM Setup
ledcSetup(ledChannel_hori, freq_hori, resolution_hori); // PWM CH1, Frequncy 50 Hz, 16bit resolution
ledcAttachPin(ledPin_hori, ledChannel_hori); // PWM CH1을 GPIO 19번으로 출력
ledcSetup(ledChannel_vert, freq_vert, resolution_vert); // PWM CH0, Frequncy 50 Hz, 16bit resolution
ledcAttachPin(ledPin_vert, ledChannel_vert); // PWM CH0을 GPIO 19번으로 출력
}
void loop() {
int avlt = 0;
int avrt = 0;
int avld = 0;
int avrd = 0;
for (int i=0; i<10; i++) {
lt[i] = analogRead(ldr_lt); // Left Top
avlt = avlt + lt[i] - avlt_cali;
rt[i] = analogRead(ldr_rt); // Right Top
avrt = avrt + rt[i] - avrt_cali;
ld[i] = analogRead(ldr_ld); // Left Down
avld = avld + ld[i] - avld_cali;
rd[i] = analogRead(ldr_rd); // Right Down
avrd = avrd + rd[i] - avrd_cali;
}
avlt = avlt / 10;
avrt = avrt / 10;
avld = avld / 10;
avrd = avrd / 10;
int avt = (avlt + avrt) / 2; // Average of Top value
int avd = (avld + avrd) / 2; // Average of Down value
int avl = (avlt + avld) / 2; // Average of Left value
int avr = (avrt + avrd) / 2; // Average of Right value.
int dvert = avt - avd; // Difference Top, Down
int dhoriz = avl - avr; // Difference Left, Right
Serial.println("LT\tRT\tLD\tRD\tav.T\tav.D\tav.L\tav.R\td.ver\td.hor");
Serial.print(avlt);Serial.print("\t");Serial.print(avrt);Serial.print("\t");
Serial.print(avld);Serial.print("\t");Serial.print(avrd);Serial.print("\t");
Serial.print(avt);Serial.print("\t");Serial.print(avd);Serial.print("\t");
Serial.print(avl);Serial.print("\t");Serial.print(avr);Serial.print("\t");
Serial.print(dvert);Serial.print("\t");Serial.print(dhoriz);Serial.println("\t\n");
if (abs(dvert) > tolv) { // sensitivity
if (avt < avd) { // 아래쪽 센서가 더 밝으면
deg_vert = ++deg_vert;
if (deg_vert > 90) {
deg_vert = 90;
}
}
else if (avt > avd) { // 윗쪽 센서가 더 밝으면,
deg_vert = --deg_vert;
if (deg_vert < 0) {
deg_vert = 0;
}
}
servoWrite(ledChannel_vert, deg_vert);
}
if (abs(dhoriz) > tolh) { // sensitivity
if (avl > avr) { // 왼쪽 센서가 더 밝으면
deg_hori = --deg_hori;
if (deg_hori < 0) {
deg_hori = 0;
}
}
else if (avl < avr) { // 오른쪽 센서가 더 밝으면
deg_hori = ++deg_hori;
if (deg_hori > 180) {
deg_hori = 180;
}
}
else if (avl == avr) {
// nothing
}
servoWrite(ledChannel_hori, deg_hori);
}
delay(500);
}
// deg는 0~180도 까지
void servoWrite(int ch, int deg)
{
duty = map(deg, 0, 180, 1638, 8192);
ledcWrite(ch, duty);
delay(50); // delay를 줄이면 180도가 완전히 돌지 않음 (최소값 15)
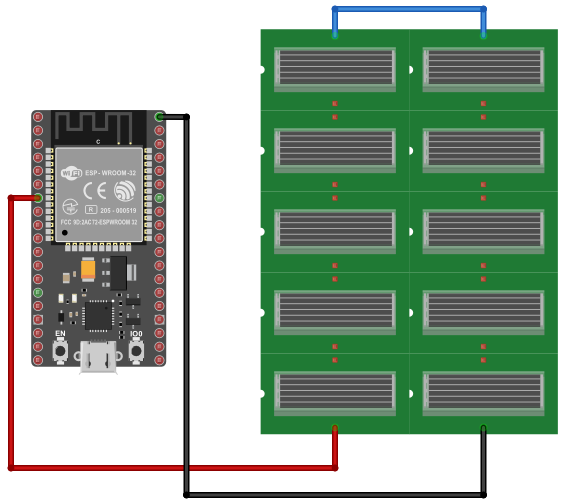
}태양광 패널의 전압 측정하기#
MPPT모듈을 만들기 전, 태양광패널에서 만들어지는 전기의 전압을 측정해본다. ESP32의 경우 내부전압 3.3V, 12bit ADC이므로
// ESP32 3.3V -> 3.21 , Arduino 5.0V -> 4.89
const float referenceVolts = 3.21;// ESP32 12bit_ADC (4095.0), Arduino 10bit_ADC (1023.0)
float volts = (referenceVolts/4095.0)*val*1000;를 사용한다.
schematic#
sketch#
// ESP32 3.3V -> 3.21 , Arduino 5.0V -> 4.89
const float referenceVolts = 3.21;
void setup() {
Serial.begin(9600);
}
void loop() {
float volts_sum = 0;
for (int i=0; i<=10; i++) {
int val = analogRead(32);
// ESP32 12bit_ADC (4095.0), Arduino 10bit_ADC (1023.0)
float volts = (referenceVolts/4095.0)*val*1000;
volts_sum = volts_sum + volts;
delay(100);
}
volts_sum = volts_sum / 10;
Serial.print("V = ");
Serial.print(volts_sum);
Serial.println(" mV");
delay(100);
}